Graphics Reference
In-Depth Information
Camel
Head
Torso
Front left leg
Front right leg
Front left
thigh
Front left
lower leg
Front right
thigh
Front right
lower leg
Front left
foot
Front left
shin
Front right
foot
Front right
shin
For readability,
only joint transforms
are shown here.
Rear left leg
Rear right leg
Rear left
thigh
Rear left
lower leg
Rear right
thigh
Rear right
lower leg
Rear left
foot
Rear left
shin
Rear right
foot
Rear right
shin
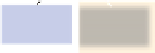
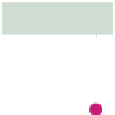
Figure 6.49: Scene graph of a camel constructed without reusable components, allowing
individual control of each joint.
Camel
Head
Torso
Front left leg
Rear left leg
Rear right leg
Front right leg
Thigh
Thigh
Thigh
Thigh
Lower leg
Foot
Shin
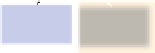
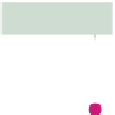
Figure 6.50: Reducing the storage cost by reusing a lower-leg submodel, with no loss of
flexibility in joint control.
As the figure makes clear, each instantiation of the reusable
LowerLeg
has its
own knee joint transform, so there is no loss in flexibility—each knee joint is still
individually controllable. This DAG-based design is identical in functionality to
the tree-based design above.
Thus far, we have been focused on supporting a high-fidelity animation of the
camel's movement, but there other scenarios of interest. Consider a desert scene
in which hundreds of camels, seen from afar, are crossing dunes in a caravan.
The amount of processing needed to animate each hip and knee joint individually
might be considered not worth the cost, especially if the caravan is so far from the
viewpoint that such details would not be apparent to the viewer. In such a case,
we might choose a lower-fidelity motion in which the camels move in unison,