Graphics Reference
In-Depth Information
with finite-precision arithmetic, introducing small-magnitude errors (see Fig-
ure 36.5). So we must explicitly phrase all applications of the visibility function
and all intersection queries with some small offset. This is often called
ray bump-
ing
because it “bumps” the origin of the visibility test ray a small distance from the
starting surface. Note that the bumping must happen on the other end as well. For
example, to evaluate
V
(
Q
,
P
)
, attempt to find a scene point
X
=
Q
+
S
(
Q
−
P
)
t
for
<
. If and only if there is no scene point satisfying that constraint,
then
V
(
Q
,
P
)=
1. Failing to choose a suitably large
t
< |
P
−
Q
|−
value can produce artifacts
such as
shadow acne
(i.e.,
self-shadowing
), speckled highlights and reflections,
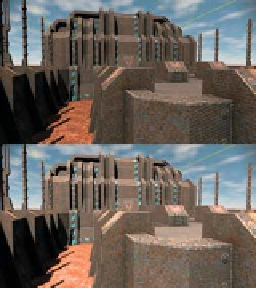
and darkening of the indirect components of illumination shown in Figure 36.4.
The noisy nature of these artifacts arises from the sensitivity of the comparison
operations to the small-magnitude representation error in the floating-point values.
Figure 36.4: (Top) Self-occlusion
from insufficient numerical pre-
cision or offset values causes
the artifacts of shadow acne and
speckling in indirect illumination
terms such as mirror reflections.
(Bottom) The same scene with the
shadow acne removed.
Primary visibility
(a.k.a.
eye ray visibility, camera visibility
) is visibility
between a point on the aperture of a camera and a point in the scene. To render
an image, one visibility test must be performed per light ray sample on the image
plane. In the simplest case, there is one sample at the center of each pixel. Comput-
ing multiple samples at each pixel often improves image quality. See Section 36.9
for a discussion of visibility in the presence of multiple samples per pixel.
A pinhole camera has a zero-area aperture, so for each sample point on the
image plane there is only one ray along which light can travel. That is the
primary
ray
for that point on the image plane. Consider three points on the primary ray:
sample point
Q
on the imager, the aperture
A
, and a point
P
in the scene. Since
there are no occluding objects inside the camera,
V
(
Q
,
P
)=
V
(
A
,
P
)
.
Since the visibility function evaluations or intersection queries at all samples
share a common endpoint of the pinhole aperture, there are opportunities to amor-
tize operations across the image.
Ray packet tracing
and
rasterization
are two
algorithms that exploit this technique. For more details, see Chapter 15, which
develops the amortized aspect of rasterization and presents the equivalence of
intersection queries under rasterization and ray tracing.
Coverage
is the special case of visibility for points on the image plane. For a
scene composed of a single geometric primitive, the coverage of a primary ray is
Possible intersection
approximations due
to inite precision
Possible
outgoing rays
Incoming ray
True intersection
point,
on
surface
Self-occlusion
Object
Object
Figure 36.5: Finite precision leads to self-occlusions. “Bumping” the outgoing ray biases
the representation error in a direction less likely to produce artifacts by favoring the points
above the surface as the ray origin.