Graphics Reference
In-Depth Information
Key2
position
Interpolated
position
Key1
position
Figure 35.16: An interpolated
leg position between key poses
found by one of the earliest
inverse kinematics algorithms.
(Courtesy of A.A. Maciejewski,
©1985 ACM, Inc. Reprinted by
permission.)
Figure 35.17: Four images of animated characters autonomously performing complex tasks
requiring motion planning. (Courtesy of the Graphics Lab at Carnegie Mellon University.
©2004 ACM, Inc. Reprinted by permission.)
Figure 35.18: Complex global
flocking behaviors (top) emerge
in Reynolds's seminal “boids”
animation system [Rey87] from
simple, local rules for each
virtual bird (bottom). (©1987
ACM, Inc. Included here by
permission.) (Courtesy of Craig
Reynolds,
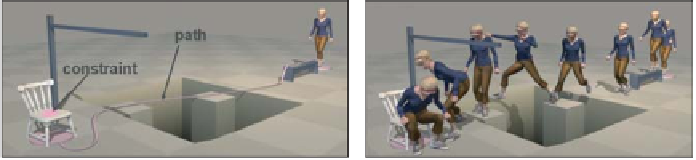
Figure 35.19: A complex traversal requiring both pathfinding and general motion planning
[SH07]. (Courtesy of Jessica Hodgins and Alla Safonova ©2007 ACM, Inc. Reprinted by
permission.)
drawers must be opened before the clothes could be taken out. Figure 35.17 shows
some examples of “simple” daily tasks that represent complex planning challenges
for virtual characters.
A special case of motion planning is the task of navigating through a vir-
tual world. At a high level, this is simply pathfinding for a single character. When
there are enough characters to form a crowd, the multiple-character planning prob-
lem is more challenging. Creating the phenomenon of real crowds (or herds, or
flocks ...) is surprisingly similar to simulating a fluid at the particle level, with
global behavior emerging from local rules as shown in Figure 35.18.
©1987
ACM,
Inc.
Reprinted by permission.)
When the space to be traversed does not admit a character's default method
of locomotion, the pathfinding problem is of course much harder. For example,
the character in Figure 35.19 must not only find a path, but also decide when to
crouch and when to jump to avoid obstacles on the desired path while satisfying
physical constraints on the body.