Information Technology Reference
In-Depth Information
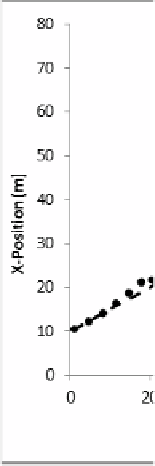
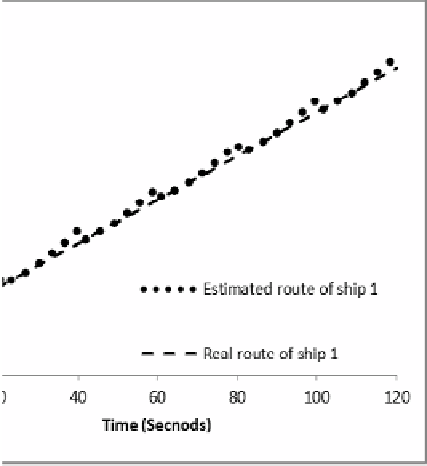
Fig. 5.
T
The real and estimated route of target ship 1
specific region to assist in d
illustrates this scenario in
device to re-scan sector 2.
will be highlighted for the o
Once the obstacle is iden
system recommends suitab
recommends a port-side ma
the collision of the nearby
and may not necessarily be
Finally, Fig. 5 provides a
positions of the ship 1 invo
clear that the ODA system
the obstacles in the vicinity
some error accumulated by
the obstacle is directly seen
determining potential collision threats in that sector. Fig
which the risk assessment unit requests the pan and
The request can be seen at the top of the virtual map
operator.
ntified as creating a potential risk of collision, the propo
ble action to avoid it. In Fig. 4, the proposed syst
anoeuvre in addition to reducing the speed in order to av
ship. This action is shown for demonstration purpose o
COLREGs compliant.
a comparison between the actual and the estimated relat
olved in the experiments using the prediction system. I
m provides the path planner the required information of
y even if there is no direct LOS with the obstacle. Howev
y the estimation can be observed which is corrected w
n by the vision system.
g. 3
tilt
and
osed
tem
void
only
tive
It is
f all
ver,
when
5
Conclusion
The provisioning of obstac
vehicles is a challenging r
such an experimental platf
proposition of a practical vi
performance evaluation o
cle detection and avoidance system of unmanned surf
research issue. This paper highlights the development
form. The key contributions of this paper are twofold:
ision-based ODA module and (2) conducting the extens
of the proposed system in virtual dynamic mariti
face
t of
(1)
sive
ime
Search WWH ::

Custom Search