Information Technology Reference
In-Depth Information
1
1
l
tensegrity
r
ij
2
2
n
n
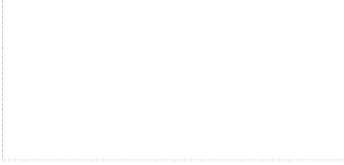
Fig. 4.
Block diagram of tensegrity-based formation closed-loop system. Subsystems and tendon
controllers are denoted by Σ and Λ, respectively.
l
tensegrity
and
r
ij
are both vector quantities.
is defined as stress [Con82] and
α
ij
is a signed scalar parameter that determines the
α
ij
<
0) force that is exerted on the
i
th
attracting (
α
ij
>
0) or repelling (
vehicle with
respect to its neighbour
j
th
vehicle [LN12].
The parameter,
l
tensegrity
is the equilibrium tensegrity length in the structure, which
in control terms, it is the desired distance between
i
th
and
j
th
vehicles.
r
ij
is the current
relative distance between the two vehicles,
l
ultimate
is the maximum distance between
the controlled pair of vehicles, where ultimate tensile strength (attracting or positive
force) that is applied to the
i
th
vehicle increases. After this point, this attracting force
starts to reduce. This is done in order to reduce the rebound force that will occur on the
i
th
vehicle if the disturbance is suddenly removed.
l
break
is the maximum length of the string; the string is fractured at this point if the
disturbance force continues to be added to the string. In formation control terms,
l
break
is the maximum communication length between the vehicles. The control force,
f
ij
,is
equal to zero at this point to give up a straying vehicle rather than trying to apply more
force on it to pull it back to the formation. This vehicle might collide with the other
vehicles in the formation when the disturbance force is suddenly removed due to the
large restoring force.
In the cross tensegrity-based formation control, there will be
n
applied tendon forces
and
n
(
n
1)
/
2 communication links in a formation containing
n
vehicles shown as
block diagram in Figure 4.
−
4.3
Nomoto Model/Autopilot Design
In this paper, all the vehicles are restricted to two-dimensional motion, hence the pa-
rameters of roll and pitch angles (
) can be eliminated. For the simplification
in designing the controller, all the vehicles in the formation are assumed to have the
same dynamics which can be represented by a linear first order Nomoto model given
by Equation 5.
φ
and
θ
T
¨
ψ
+ ˙
ψ
=
K
n
δ
(5)
whose transfer function is:
ψ
δ
(
s
)=
K
n
s
(1+
Ts
)
(6)
Where
T
is the time constant in the system and
K
n
is the gain that can be uniquely
determined from the input rudder angle (
). The
values of
K
n
and
T
are chosen to be 0.049 and 17.78 for simulation purposes [TC99].
δ
) and the output heading angle (
ψ




































































Search WWH ::

Custom Search