Information Technology Reference
In-Depth Information
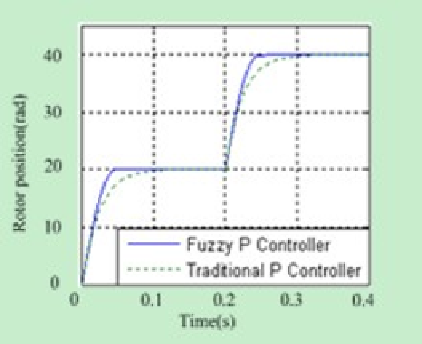
Fig. 7.
Simulation results of position servo system
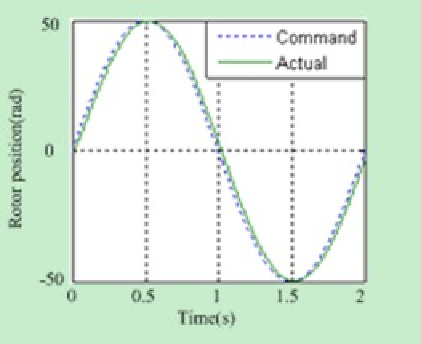
Fig. 8.
Rator position of BLDCM with sinusoidal command position
BLDCM speed with fuzzy P controller rose faster than that with traditional P
controller, both of them without overshoot phenomenon at the end. In order
to verify the speed servo performance further, suppose the command position
signal is a sinusoidal one. The simulation result is shown in Figure 8. Figure 8
shows that IMC-fed BLDCM position servo system could track the command
position signal at any time with good performance.
5 Conclusions
From the simulation results, it could be concluded that IMC-fed BLDCM drive
system is practical. In both speed and position servo systems, the performances
Search WWH ::

Custom Search