Information Technology Reference
In-Depth Information
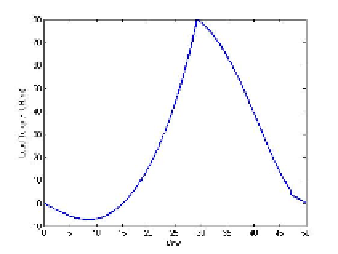
Fig. 1.
Load torque curve fitting by a period
U
2
=
υ
=[
υ
1
···
υ
γ
]
T
n
:c
i
≤
∈
R
υ
i
≤
d
i
,i
=1
,
···
,r
}
(7
b
)
where
E
i
is the vector with
gamma
dimenions,
b
i
,
c
i
and
d
i
are real numbers.
Assume that
U
=
U
1
∩
U
2
, obviously,
U
is a compact convex subset satisfying
U
U
, then the boundary measur-
able function
u
is called admissible control within the interval [0
,T
]. Let
∈
R
n
. Given interval
t
∈
[0
,T
], if
u
(
t
)
∈
U
is a
collection of admissible control. For each control variable
u
u
)be
the corresponding vector-valued functions, which is absolutely continuous and
satisfies the differential equation (3) in [0
,T
]. Obviously, this function is also
a dynamic system (3) satisfying the initial conditions (6) corresponding to the
u
∈U
,let
x
(
·|
∈U
state solution, so the optimal control problem can be expressed as follows:
Problem 1.
Given the system (1), find a control
u
∈U
such that the cost
function
g
0
(
u
)=
T
0
x
1
(
t
))
2
+(
x
2
(
t
)
x
2
(
t
))
2
]
dt
[(
x
1
(
t
)
−
−
(8)
is minimized subject to the following inequality constraints:
a
≤
x
1
≤
b,
(9)
c
≤
x
2
≤
d
where
x
1
(
t
)and
x
2
(
t
) are the targets of the state variable
x
1
,
x
2
.
3 Solution Algorithm
This paper will use parameterization to solve optimal control problem with in-
equality constraints. The method is to set up state variable of system dynamic
model as piecewise constant functions with respect to time. The time interval
[0
,T
] is divided into some sub-interval, and each constant control to instantly
switch at split point. In order to achieve optimal control of dynamic systems,
many numerical optimization methods are used to solve these control parame-
ters. In [7] and [14], the convergence of parametic approach is proved. We use
Search WWH ::

Custom Search