Information Technology Reference
In-Depth Information
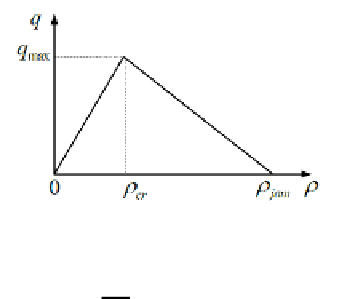
Fig. 2.
The flow-density fundamental diagram of highway trac
operators of the form
finite
a
α
d
α
ds
α
where
α
∈
R
(
s
). This is a non-commutative
d
s
ds
=[
ds
s,s
ds
]=1.
ring according to Weyl algebra, since
ds
s
−
of constant parameters is said to be linearly
identifiable with respect to a finite set
X
=
The finite set
θ
=
{
θ
1
,...,θ
r
}
of signals, the input
and output variables of a linear system for instance, if and only if it leads in the
operational domain:
{
x
1
,...,x
k
}
Pθ
=
Q
(6)
where
P
and
Q
are respectively
r
×
r
and
r
×
1 matrices, and the entries of
P
and
Q
belong to span
= 0. Consider the
additive perturbation, that is
y
i
=
x
i
+
ω
i
, then equation (6) become (7): (7):
Pθ
=
Q
+
Q
R
(
s
)[
ds
]
(1
,x
1
,...,x
k
). Moreover,
det
(
P
)
(7)
where,
Q
is a
r×
1 matrix with entries depending now on
ω
i
.If
ω
is structured,
it means that
ω
i
,
i
=1
,
2
,...,k
satisfies a linear differential equation with poly-
nomial coecients, and there would exist
Δ
(
s
)[
ds
], such that by multiplying
both sides of equation (7) by
Δ
annihilates the structured perturbations:
∈
R
ΔPθ
=
ΔQ
(8)
Multiplying both sides of equation (8) by suitable proper rational functions in
R
(
s
) yields proper rational functions in all the coecients.
The unstructured perturbations are modeled as highly fluctuating noises,
which can be attenuated by invariant low-pass filters, such as
F
(
s
)=1
/s
ν
,
where
ν
≥
1 is a large enough real number.
4 The Parameter Identification Scheme
In the algebraic identification framework, a novel key parameters identification
method is proposed, and the non-linearity characteristic of trac dynamic is
locally transformed into a linearization model approximately. The identification
procedure consists of five steps.
Step 1:
Convert the equilibrium speed-density function into a linearization form
so that the linear parameter identification procedure can be acquired. The log-
arithmic style of equation (4) is shown as follows:






Search WWH ::

Custom Search