Information Technology Reference
In-Depth Information
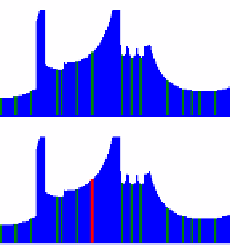
findthemin
6
findthemax
0
155
°
360
°
0
Fig. 9.
Histogram of the laser rangefinder information, every
20
°
as a sector, the robot find the
sector with largest value as new direction
a
b
Fig. 10.
(a) New hypothetical feature point(HFP). (b) Candidates.
4
Experiment
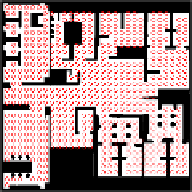
Consider a real world case; the input map will be like Fig. 2. The map shows a space
with 18.5 meters long, 18.5 meters wide. The laser rangefinder is about 30 cm above
the floor. Each of the following experiments is done in simulation 1000 times, each
time a new robot location on the map is generated randomly. We test the method with
several different resolutions, which is represented in the distance between two
hypothesis points; three examples are shown in Fig. 11.
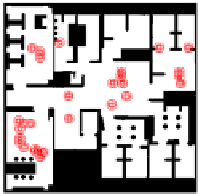
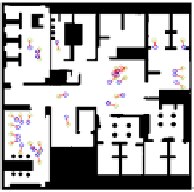
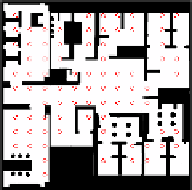
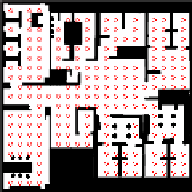
a
b
c
Fig. 11.
Different resolution



Search WWH ::

Custom Search