Biomedical Engineering Reference
In-Depth Information
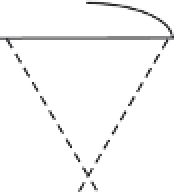
Incoming
light
Plano-
convex
lens
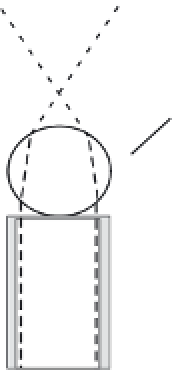
lens
Ball
lens
ball
Optical
fiber
(a)
Incoming
light
∆θ
Plano-
convex
lens
Lenset
Optical fiber
(c)
Photodiodes
(b)
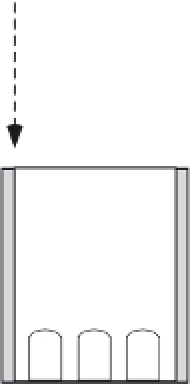
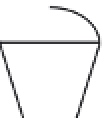
FIGURE 1.20
Optical front-end schematics of neural-superposition-based sensors capable of motion hyperacuity.
Adapted from Ref.
40
.
O'Carroll and Brinkworth developed a detailed
model for optic flow coding based on the insect
vision system. The motion detector employed in
the project is based on the Hassenstein-Reichardt
algorithm. They tested the model under a variety
of conditions and concluded that accurate and
robust detection of global motion is possible
using low-resolution optics and simple mathe-
matical operations that may be implemented in
digital or analog hardware
[51]
.