Biomedical Engineering Reference
In-Depth Information
enjoying some advantage with the disparate
photoreceptor axes
[77, 78]
. Though the photo-
receptor response in
M. domestica
is Gaussian-
shaped, hyperacuity may also be achieved with
other continuous, nonlinear functions.
Luke
et al.
studied the requirements for
motion hyperacuity in detail.
Motion hyperacuity
is defined as the ability of an imaging system to
detect object motion at a much finer resolution
than photoreceptor spacing would suggest. It
should not be confused with
static hyperacuity
such as the subpixel resolution of line pairs. It is
interesting to note that the fly has relatively poor
resolution in terms of static hyperacuity of a
random, unknown visual scene
[40]
.
A traditional imaging system is compared to
a motion hyperacuity-capable system in
Figure
1.19
. A traditional imaging system, shown in
only the
x
direction, consists of a series of pixel
elements with a rectangular function response
profile. To detect motion
(
x
)
, sufficient move-
ment must occur such that there is a detectable
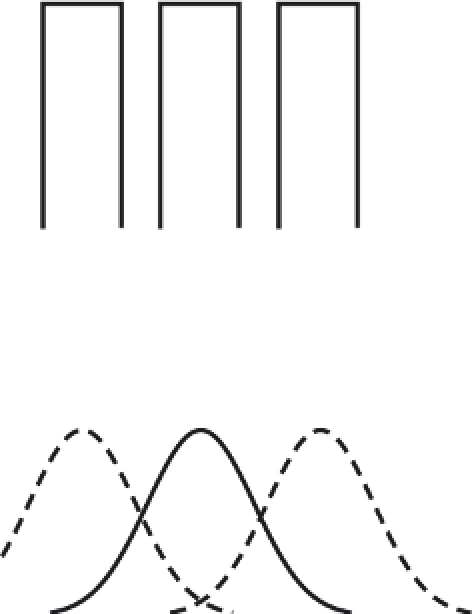
change in pixel response. With the flat, rectan-
gular profile, considerable movement relative to
the pixel width must occur before a detectable
response occurs. On the other hand, a motion
hyperacuity system has overlapping Gaussian-
shaped profiles that detect movement immedi-
ately in the primary pixel and in those adjacent
to it. The limit of detectability is the noise floor
of the system, or the contrast limit. Luke
et al.
have shown that careful control of both preblur-
ring of each pixel and the pixel spacing can opti-
mize motion-detection capability of a biomimetic
vision sensor
[40]
.
∆
(a)
∆
(b)
FIGURE 1.19
Traditional pixel imaging (a) compared to a
motion hyperacuity-capable imaging system (b). Adapted
from Luke
et al.
[40]
.
Many sensors based on the compound eye
have been developed. In 1979, Angel developed
an imaging system for an X-ray telescope based
on the eye of macruran crustaceans such as the
lobster. The lobster eye consists of a series of
small, rectangular-shaped tubes with reflective
internal surfaces. The tubes are arranged on a
spherical surface with their axes radiating from
the center of the eye. The reflective nature of the
tubes coupled with their orientation produce a
focusing effect identical to a reflective-type tele-
scope
[81]
.
Several sensors have been developed based
on the apposition compound eye. Currin deve-
loped a point-tracking system using three
1.5 BIOMIMETIC VISION SENSOR
DEVELOPMENTS
A brief review of some past and recent develop-
ments in biomimetic vision sensors is presented
in this section. Pointers to the literature are
provided to allow readers to obtain additional
information on specific projects.