Biomedical Engineering Reference
In-Depth Information
somewhat dependent on the environment. As
Figure 9.28 shows
, there is close agreement
between the optical-flow computation and GPS
over the 800 m flight.
-30.922
-30.924
9.6 CONCLUSION
Integration of sensors and controls into a robust
system is a challenge in biomimetic flying sys-
tems. Implementations of each of the sensors
function as part of a flying system, but the
system does not yet operate as an integrated
whole. Each sensor has weaknesses. Optical
flow requires texture, ocelli require a distinct
horizon, and polarization requires visibility
of the sunlit or moonlit sky. There are layers
of behavior above the simple reflexes we have
implemented that would allow systems to con-
tinue to operate in adverse conditions. What
we have shown is a series of reflexes that are
capable of almost complete control of a UAV
using only light from the environment, which
is radically different from conventional naviga-
tion avionics.
We have demonstrated substantial auton-
omy with an array of simple sensors in a sim-
ple environment. Insects use optical flow over
the entire visual field for flight control; they
have a distributed view of the polarization pat-
tern above and below the horizon. The polari-
zation-sensitive array in the dorsal rim extends
over a large arc of the sky. Ocelli may have
spatial resolution required to detect motion
and resolve the horizon. A comprehensive sen-
sor suite emulating the insect optical and neu-
ral system would provide the means to
implement these behaviors robustly in com-
plex environments.
-30.926
-30.928
-30.93
136.544
136.546
136.548
Longitude (deg)
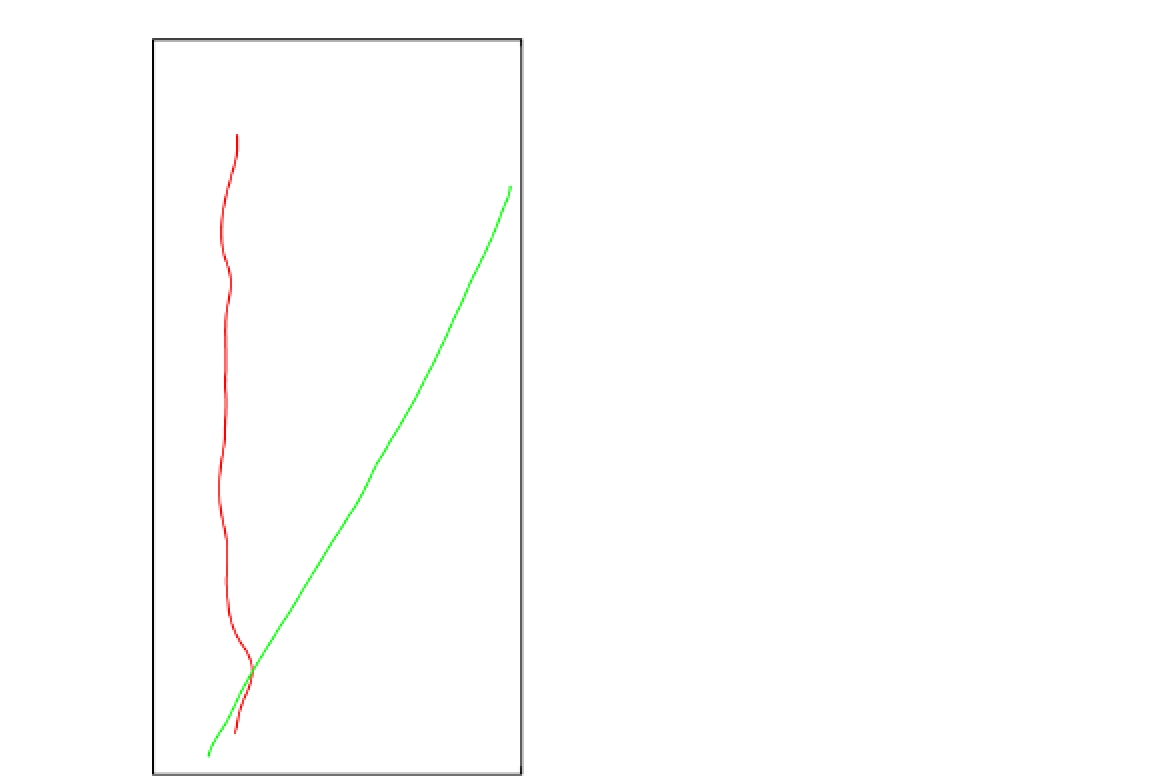
FIGURE 9.27
The red/left trace shows a course that was
corrected for lateral drift using optical flow; the green/right
trace is a flight immediately afterward in which the optical-
flow system was turned off. In both cases, the UAV was
commanded to fly grid North.
within 1° over an 800 m trajectory, shown in
Figure 9.27
.
The altitude computed using optical flow was
offset using the known height of the ground.
This allowed the flight-control system to switch
between GPS altitude and optical-flow altitude
without large steps. Optical flow depends on
visual texture on the ground and is thus