Biomedical Engineering Reference
In-Depth Information
U
G
O
U
G
O
UV
UV
+
+
+
-
Σ
Σ
Σ
-
-
K
K
Green
Green
Roll Command
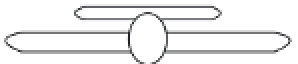
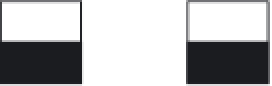
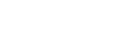
FIGURE 9.17
The environment measured by a green-sensitive sensor is illustrated on the left; in the center is the same
measurement by the ultraviolet sensor. With the correct weighted sum of the two sensors, the effect of the sun can be
removed.
control system shown in
Figure 9.17
will cause
the behavior shown in
Figure 9.12
.
smaller, with a crossover point very close to zero
(
Figure 9.18
). Rotation about the yaw axis sim-
ply showed that variations in skylight levels in
the ultraviolet and green wavelengths had mini-
mal effect on the difference between the opposed
spectrally opponent signals (
Figure 9.19
). In
contrast, the individual photodiode voltages
showed significant variations between right and
left throughout the rotation.
The simulation revealed that the spectrally
opponent signal-processing technique is a signifi-
cant improvement over the ultraviolet intensity-
balancing approach proposed after the first
investigation of the dragonfly ocelli
[30]
while
remaining biologically plausible. In earlier work
[37]
, we attempted to use the originally described
function of the ocelli for stabilization on both
pitch and roll axes. Adequate stabilization was
observed in roll, with inconsistent results in pitch.
In these flight-test experiments, we chose to use
a longitudenal axis control system based on baro-
metric pressure that indirectly maintained a sta-
ble pitch attitude. Advanced biomimetic ocelli
with designs inspired by recent advances in biol-
ogy
[32]
might control the pitch axis more robustly.
9.4.2 Static Test
The ocelli were simulated using data from the
scanning device carrying the ocelli implementa-
tion. Intrinsic to the simulation was the ability
to roll, pitch, and yaw in order to determine the
response of the elements of the ocelli to move-
ments of the horizon.
When the simulation was run with lateral
ocelli only, the advantage of spectral opponency
became clear. The simulated vehicle was sub-
jected to roll, pitch, and yaw motions within a
virtual viewsphere created with the simulated
data.
On the roll axis, the difference between the
signal from each side in corresponding wave-
lengths was always non-zero at zero roll angle.
Following the simple light-balancing rule, this
approach would lead to a significant bank angle.
When the signal considered was the spectrally
opponent signal from each side, it was apparent
that the bias caused by the sun was much