Biomedical Engineering Reference
In-Depth Information
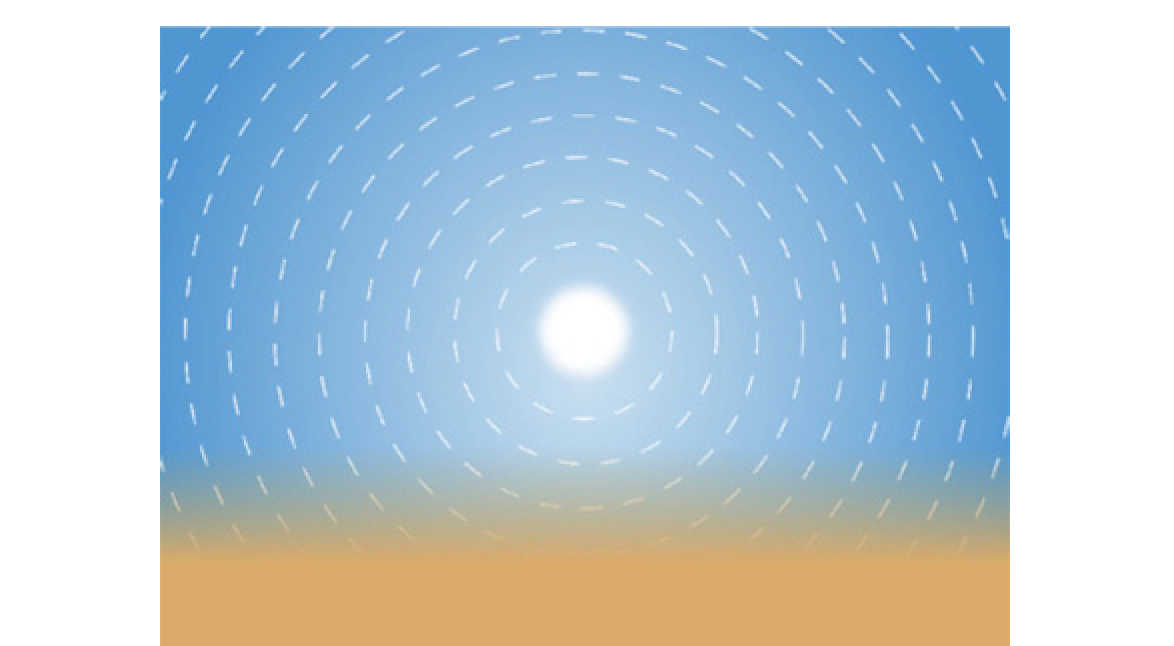
FIGURE 9.4
The sky polarization pattern cast by the sun is approximately tangential to the sun at every point.
flights over the Arctic in the early 1950s using a
polarization-sensitive astrolabe device
[22]
. This
form of navigation was driven by the arctic envi-
ronment. At high latitudes the sun is either at
low elevations or below the horizon. The mag-
netic field is oriented almost vertically and varies
significantly over small distances. Gyrocom-
passes do not perform well, because navigation
is over the axis of rotation of the Earth
[23]
. Prior
to the advent of the global positioning system
(GPS), polarization provided a self-sufficient
measurement of bearing advent of the in an envi-
ronment unforgiving of technical faults.
Implementations of polarization compass-
ing have also been developed for a ground
robot by Lambrinos
et al.
[24]
. Their imple-
mentation used a polarization sensor to guide
dead-reckoning navigation. The approach was
demonstrated to be effective on the ground
but is not suitable for a dynamic airborne
implementation due to the need to rotate in
position. Artificial polarization compasses
have been postulated by others since then
[12,
25]
. The most promising applications of polar-
ization compass are in the unmanned aero-
space field.
9.3.1 Sensor Signal Processing
Polarization sensing requires a series of elements.
First, the optics capture light from a region of
the sky, which is then analyzed in at least three
polarization angles. In our work, measurement
was achieved using three photodiodes, each
with its own optics and polarization filters. A
version of the sensor is shown in
Figure 9.5
. The
outputs of the photodiode amplifiers were digi-
tized and processed on a microcontroller.
Any light-sensitive element will be imperfect,
with different units responding to the same sig-
nal with different output voltages. A simple
model of the response, which is effective if the
supporting electronics are designed well, is to
assume that the output of each sensor is linear,