Biomedical Engineering Reference
In-Depth Information
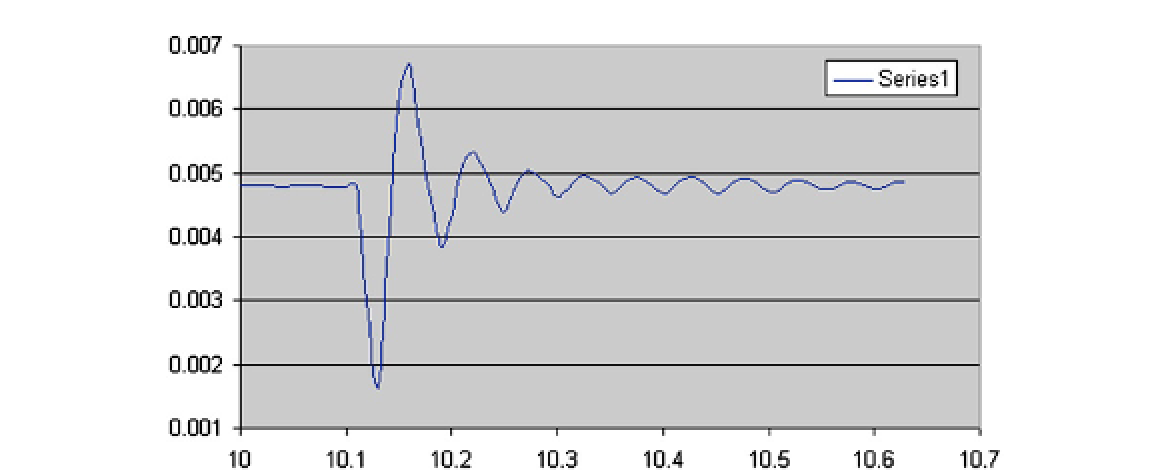
FIGURE 6.9
Voltage (volts, vertical axis) versus time (seconds, horizontal axis) for a chitosan/IBMC cantilever (sample
size 3 mm
×
40 mm
×
0.24 mm) bent initially by 90° and then released to vibrationally damp out.
remarkable, as depicted in
Figure 6.9
, which
depicts a typical sensing signal from a
3 mm
×
40 mm
×
240
μ
m IBMC strip.
To measure the force density of the IBMCs,
high-resolution load cells (Mettler or Omega
load cells with milligram resolution) are used as
shown in
Figure 6.10
. The force exertion
characteristics of chitosan IBMCs were quite
good in the sense that the resulting force density
was estimated to be about 35, which is close to
IPMCs, force density in a cantilever form, which
is about 45.
Force density
means the ratio of the
blocking force for an IBMC cantilever strip at its
tip to the weight of the cantilever strip itself.
This will define an objective variable for actuator
force generation and comparison. In this regard,
a blocking force measurement set-up was used
(
Figures 6.10
a and 6.11b) and a sample was
loaded with a coin (a quarter,
Figure 6.10
c) to
assess its blocking force. The force density of
these IBMCs appears to be about 35 (normalized),
which means in a cantilever form they can exert
a blocking force more than 35 times the weight
of the cantilever active part.
A chitosan blended with ionic polymers such
as perfluorinated sulfonic or carboxylic mem-
branes could lead to a new generation of
chitosan/IBMCs that show bending towards the
anode, as shown in
Figure 6.10
.
6.4 M
ODELING AND SIMULAT
ION
De Gennes
et al
.
[46]
presented the first
phenomenological modeling of sensing and
actuation in IPMCs based on linear irreversible
thermodynamics and equilibrium of forces
and fluxes. Shahinpoor and Kim
[47]
further
discussed the fundamental mechanisms of
sensing and actuation in IPMCs based on
osmotic diffusion and Nernst-Plank equations.
Asaka
et al
.
[48]
presented an ion diffusion-
based model for sensing and actuation of IPMCs.
Nemat-Nasser and Zamani
[49]
also presented
an electrochemomechanical modeling of the
response of ionic polymer-metal composites with
various solvents. Bonomo
et al
.
[50]
developed
a software tool for simulation of actuation and
sensing in IPMCs. Chen and Tan
[51]
presented
a control-oriented and physics-based model
for ionic polymer metal composite actuators.
Del Bufalo
et al
.
[52]
discussed a mixture
theory framework for modeling the mechanical
actuation of ionic polymer-metal composites.