Biomedical Engineering Reference
In-Depth Information
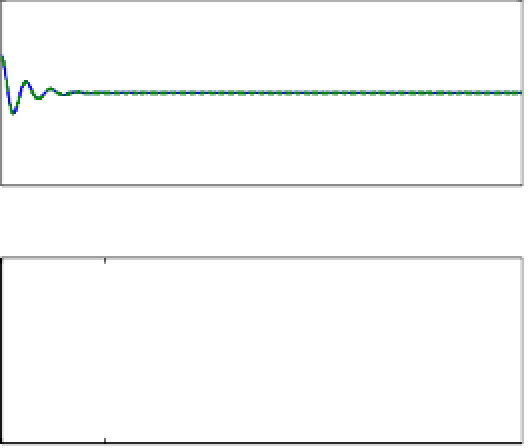
Muscle States Compared
0.05
0
Simulated
Estmtd.
−0.05
0
2000
4000
6000
8000
10000
0.02
0
−0.02
Simulated
Estmtd.
−0.04
−0.06
0
2000
4000
6000
8000
10000
0.5
Simulated
Estmtd.
Simulated
Estmtd.
0
−0. 5
0
2000
4000
6000
8000
10000
2
0
−2
Simulated
Estmtd.
Simulated
Estmtd.
−4
0
2000
4000
6000
8000
10000
No. of time steps
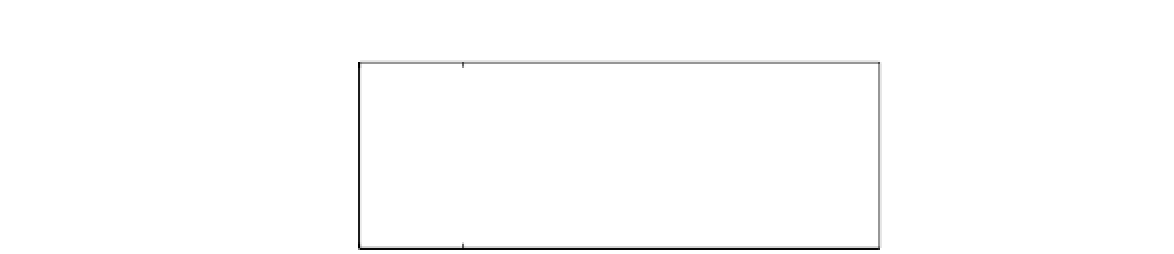
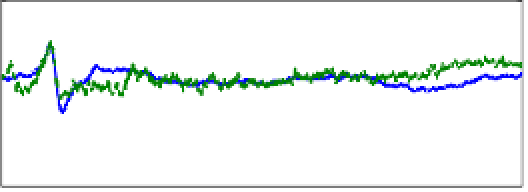
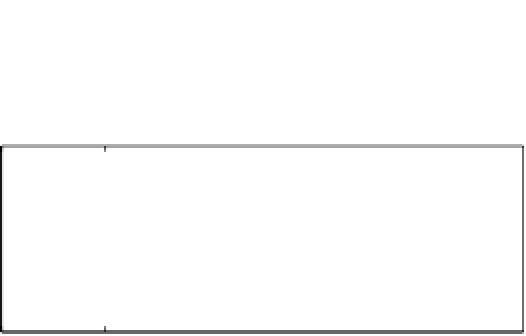
FIGURE 4.9
UKF estimated and simulated responses of the two activation states, the limb rotation, and the limb rotation
rate.
activation input was scaled white noise. The
estimated and simulated responses of the two
activation states, the limb rotation, and the rota-
tion rate are shown in
Figure 4.9
.
The case of the adaptive UKF-based state esti-
mation and parameter identification, where the
process noise covariance is continuously
updated, was also considered. A key difference
between the results obtained by the use of the
UKF and the adaptive UKF is in the estimates of
the initial length of the tendon. For this reason
a nonlinear model of the tendon length dynam-
ics was also employed. The advantage of using
the nonlinear model is that the tendon could not
only be allowed to be slack in its rest state, but
one is also allowed to incorporate nonlinearities