Biomedical Engineering Reference
In-Depth Information
example. The nonlinear
H
∞
controller synthe-
sis method is applied to this problem, although
there are more effective methods of controlling
the plant, such as controller partitioning. Thus,
the feasibility of the nonlinear control technique
and its limitations can be assessed. One of the
major advantages of the use of the nonlinear con-
troller synthesis methodology is the availability
of well-defined algorithms for solving algebraic
Riccati equations and for unscented Kalman
filtering, which could be routinely adapted to
solve the nonlinear controller synthesis problem.
The measurements were assumed to be the
three angular link positions measured at the
pivots. All of the process and measurement
disturbances were modeled as white noise or
delta-correlated random inputs. The measurement
disturbances were assumed to be relatively very
small compared with the process noise. Each of the
process disturbance torques was assumed to be
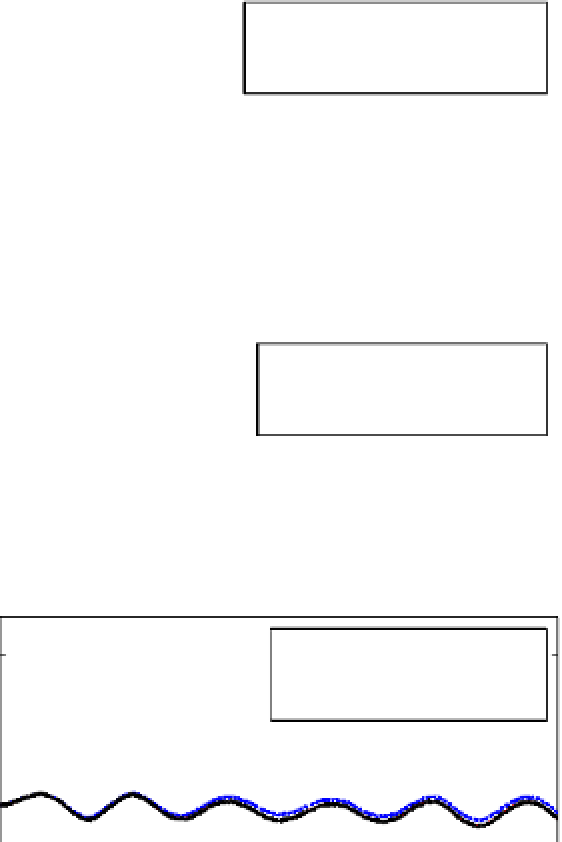
Simulation, estimates and measurements of
angular position perturbations
x 10
−3
20
Simulated base−link
Estimated base
−link
Measurement
10
0
0
2000
4000
6000
8000
10000
12000
Number of time steps
20
x 10
−3
Simulated mid
−link
Estimated mid
−link
Measurement
10
0
0
2000
4000
6000
8000
10000
12000
Number of time steps
Simulated tip
−link
Estimated tip−link
Measurement
0.04
0.02
0
0
2000
4000
6000
8000
10000
12000
Number of time steps
FIGURE 4.8
Simulated, estimated and measured angular positions, in radians, of the base-link, mid-link and tip-link in
the controlled 3-link flexible manipulator obtained by using the improved state estimator to compute the control gains.