Biomedical Engineering Reference
In-Depth Information
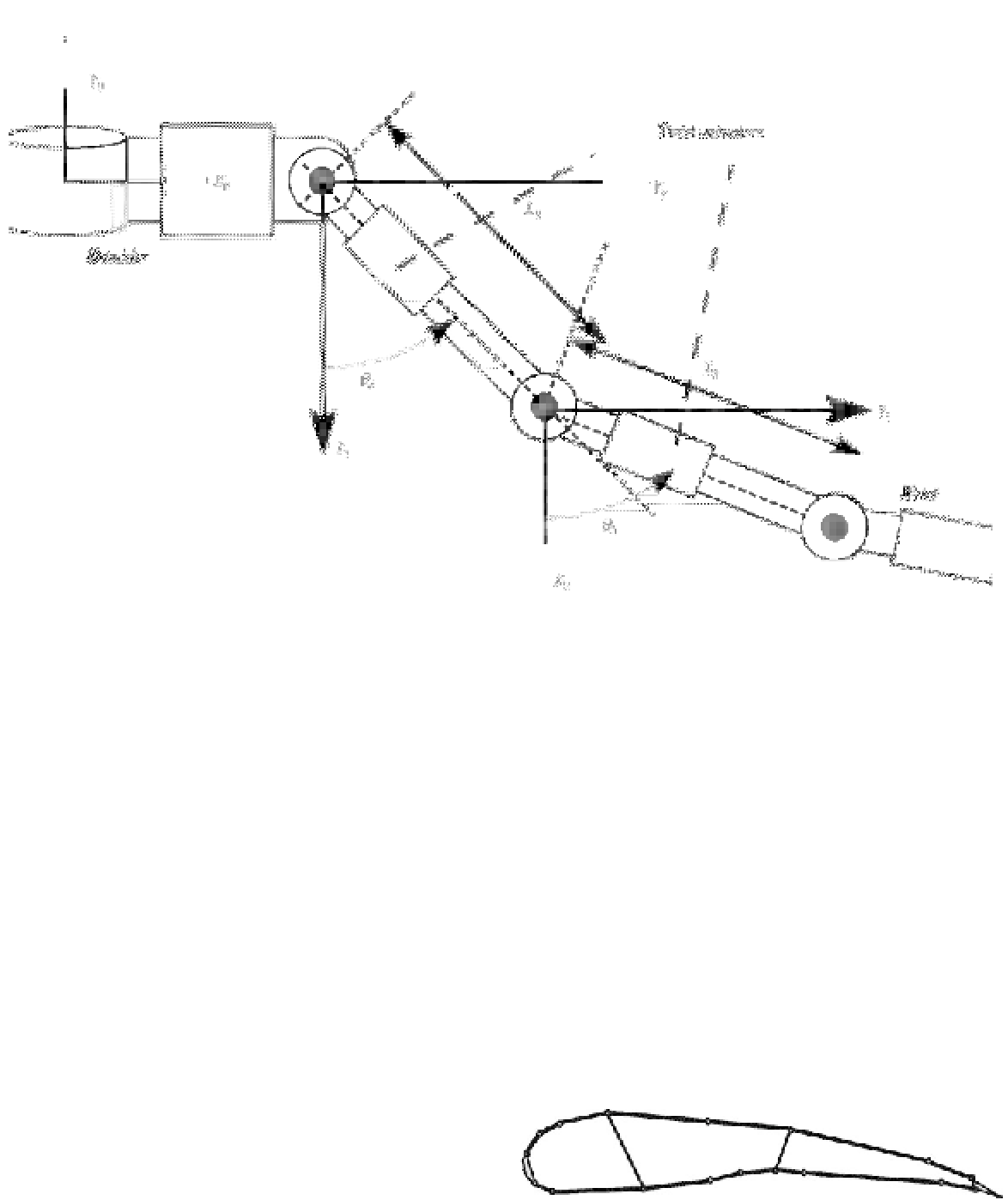
FIGURE 4.1
Mechanical model of the forearm.
is discussed. Each joint can be modeled as a
mechanical system, as shown in
Figure 4.2
,
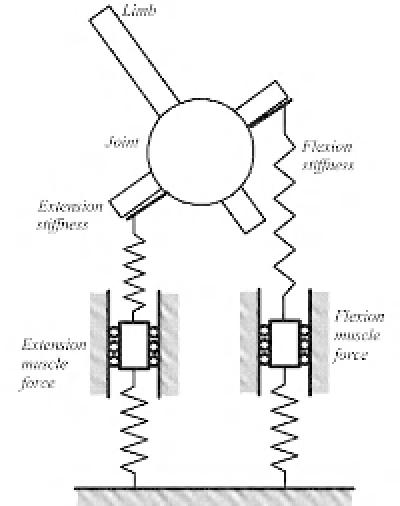
where the dampers are omitted since these are
generally parallel to the springs. Each joint in
the serial manipulator is assumed to be driven
by an antagonistic pair of actuators.
4.2.5 Shape and Morphing Control
Recent studies conducted by Weisshaar
[12]
and
Bae
et al
.
[13]
have indicated that morphing of
the airfoil shape has several potential benefits
FIGURE 4.2
Mechanical model of a joint driven by an
antagonistic pair of actuators.
FIGURE 4.3
Airfoil actuated by an assemblage of rigid-link
actuators.