Global Positioning System Reference
In-Depth Information
2
M
−
i
⎛
⎞
(7)
ξ
=
⎜
⎟
i
M
⎝
⎠
For
M
= , the gap between
the largest side peak and the main peak is only 2.5 dB. With increase of
M
, the difference
between the maximum side peak and the main peak decreases, while the false acquisition
probability increase.
M
= , side peaks are 6 dB weaker than the main peak. But for
2
6
(a)
(b)
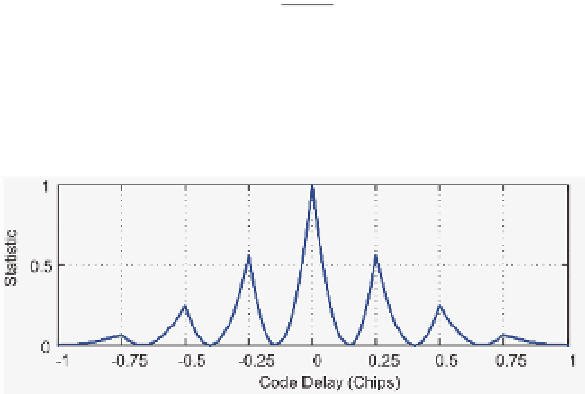
Fig. 2. (a) The Statistic in Acquisition Stage and (b) The Discriminator Curve in Tracking
Stage of BOC(2
n
,
n
) Signal
It can be seen from Figure 2(b) that when using a traditional narrow early-minus-late
(NEML) tracking loop (Van Dierendonck et al., 1992) with the early-late separation ∆, the
discriminator characteristic curve of BOC(
m
,
n
) signal has a smaller linear domain than the
one of the BPSK-R(
n
) signal. Besides, the discriminator characteristic curve of a BOC(
m
,
n
)
signal has 2
M
- 2 stable false lock points which are due to the side peaks of the
autocorrelation function. If a false acquisition occurs, in tracking stage, the code tracking
loop will initially lock on a false lock point. Even if there is no false acquisition, the false lock
can result from high noise, jitter, or short loss of lock.
Figure 3 shows an example of false lock caused by the excessive initial code delay bias in
BOC(2
n
,
n
) signal tracking. The
C
/
N
0
in this example is 45 dB-Hz, and the predetection
integration time is 1 ms, with the early-late separation 0.1 chips. It can be seen that with the


Search WWH ::

Custom Search