Global Positioning System Reference
In-Depth Information
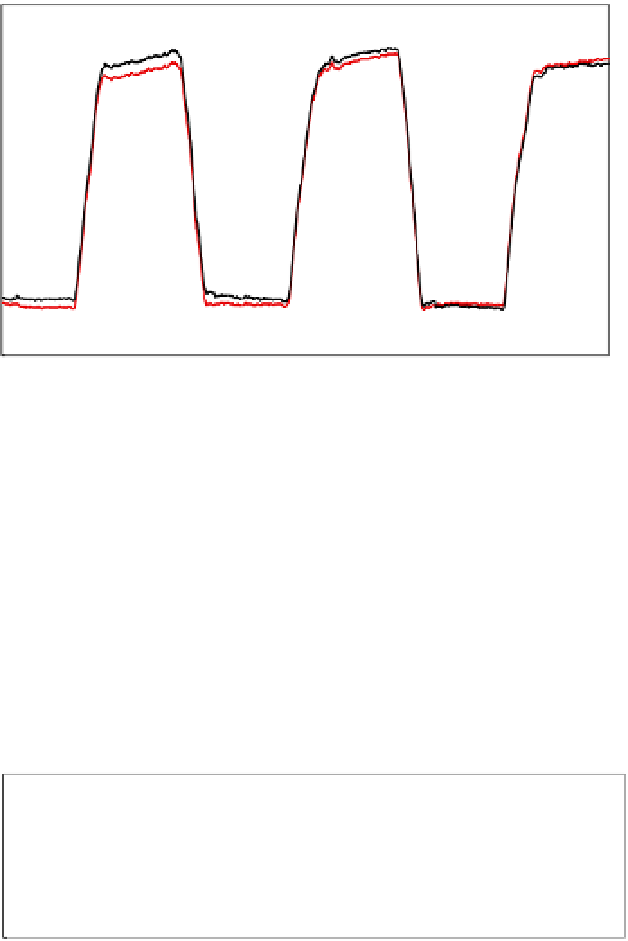
the yaw angles of these two methods; the black solid line is the combination of
GPS/IMU/images, and the red solid line is the ordinary integration of GPS/IMU. In the
case of the GPS/IMU/images combination, an accurate azimuth angle, as a yaw angle, is
recorded from the BBA. Thus, the yaw angle is then accurate from the beginning of the
measurement. On the other hand, in the ordinary combination of GPS/IMU, the Kalman
filter gradually estimates the state of a system from measurements which contain random
GPS/IMU/images
GPS/IMU
200
150
100
50
0
-50
time
(
1/20sec
)
Fig. 8. Comparison of Yaw angle
GPS/IMU/images
GPS/IMU
8
4
0
-4
-8
time
(
1/20sec
)
8
4
0
-4
time
(
1/20sec
)
Fig. 9. Comparison of Roll and Pitch angle

























Search WWH ::

Custom Search