Global Positioning System Reference
In-Depth Information
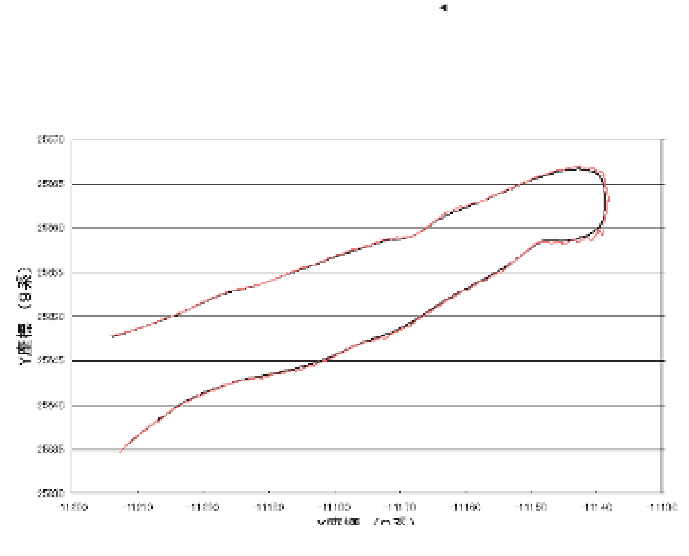
GPS/IMU. On the one hand, with an ordinary GPS/IMU, the trajectory becomes notched
because the position is revised forcibly by GPS due to drift error. The platform changes its
attitude rapidly, especially in the corner, so the notched trajectory is very obvious. The drift
error remains in the calculation until the alignment of IMU is complete. On the other hand,
with GPS/IMU/images, the drift error of IMU is aligned by initialization from the bundle
block adjustment. Moreover, the trajectory is very smooth in the corner.
Hybrid position and attitude
200 Hz
IMU
Ve l o c i t y
GPS
Ve l o c i t y
+
‐
+
‐
IMU
200Hz
GPS
1Hz
IMU
Position
GPS
Position
Ve l o c i t y E r r o r
Position Error
Camera
Kalman
filter
1Hz
Image orientation
(BBA)
Position
0.1Hz
Attitude
Fig. 6. Strapdown navigation diagram with images
GPS/IMU/images
GPS/IMU
25670
25665
25660
25655
25650
25645
25640
25635
25630
11220 11210 11200 11190 11180 11170 11160 11150 11140 11130
X
(
m
)
JGD2000
Fig. 7. Hybrid position
4.4 Evaluation of hybrid positioning
Trajectory tracking by ordinary GPS/IMU integration is compared to the combining of
GPS/IMU and continual digital images, in order to validate this combination. Figure 8 shows





























Search WWH ::

Custom Search