Global Positioning System Reference
In-Depth Information
GPS
INS
MAPs
Primary Localization Layer
Application
Estimate
Fusion and
Managemen
Layer
Integrity Monitoring Layer
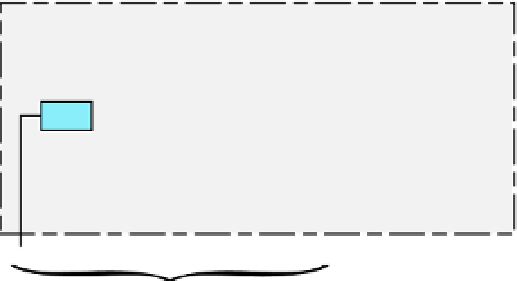
Fig. 5. The structure of the proposed framework.
accuracy and integrity are achieved by executing a proper fusion scheme. In what follows a
further description of the framework layers functionality.
9.1 Primary localization layer
The primary localization layer comprises of the system's localization techniques which are
partitioned in the form of a set of Primary Localization Units (PLUs), as can be seen in
Figure 6. Any localization technique, such as those mentioned above, can be used in any
given PLU. These primary localization units receive localization requests from the Estimate
Fusion and Management layer. Each PLU is constructed from techniques that are based
on different phenomena/algorithms to ensure minimum correlation. A primary localization
unit can share its information sources with other units; it can constitute a single modality or
multiple-modalities.
An example of a single modality PLU is one that estimates the vehicle
GPS
INS
MAPs
Localization command
from the estimate fusion
and management Layer
Loc-Req
PLU
n
PLU
1
PLU
2
`
Calibration
command from the
estimate fusion and
management layer
Preliminary location
estimates
The integrity monitoring layer
Fig. 6. Primary localization layer.
location from a GPS information source. IVCAL is an example of a PLU that utilizes three
modalities: GPS, INS, and Inter-Vehicle-Communication.
9.2 Integrity Monitoring layer
Central to the proposed framework is the integrity monitoring layer. Here, an Integrity
Monitoring unit (IMU) is used to monitor the performance of a primary localization unit
(Figure 7). The monitoring process takes in consideration the impact of the measurement
conditions on the PLU. For example, to indicate the reliability of an estimate DOP measure




































































Search WWH ::

Custom Search