Global Positioning System Reference
In-Depth Information
d
3
BS
2
(x
2
,y
2
)
d
2
BS
3
(x
3
,y
3
)
BS
1
(x
1
,y
1
)
MS
(x
m
,y
m
)
d
1
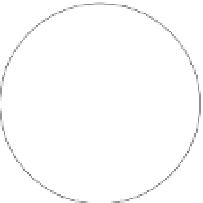
Fig. 1. The TOA localization method.
geometric arrangement of the BS's may produce a poor location estimates due to the shape of
the bounded area that contains the MS. This shortcoming might be avoided using more BS's.
The next method described below utilizes more than three BS's in estimating the MS location
so that ambiguity in the distance computation is reduced.
In Caffery (2000); Sayed et al. (2005) the Cartesian coordinate system is represented as follows.
The location of one of the base stations is assumed to be the origin (e.g., BS
1
be the origin:
(
x
1
,
y
1
)=(
)
) and the locations of the other objects in the network are computed with
respect to the origin. Hence, the distances (
d
1
,
d
2
,
d
3
....,
d
n
) can be used to estimate the
location of the MS by solving the following set of equations:
0, 0
d
1
=
x
2
m
+
y
2
m
d
2
=(
2
2
x
2
−
x
m
)
+(
y
2
−
y
m
)
d
3
=(
2
2
−
)
+(
−
)
x
3
x
m
y
3
y
m
(3)
.
d
n
=(
2
2
x
n
−
x
m
)
+(
y
n
−
y
m
)
After rearranging terms, the above equations can be written as follows:
⎡
⎣
⎤
⎦
⎡
⎣
⎤
⎦
k
2
−
d
2
+
d
1
x
2
y
2
x
3
y
3
. .
x
n
y
n
x
m
y
m
k
3
−
d
3
+
d
1
1
2
=
(4)
.
k
n
−
d
n
+
d
1














Search WWH ::

Custom Search