Global Positioning System Reference
In-Depth Information
9
A Decision-Rule Topological Map-Matching
Algorithm with Multiple Spatial Data
Carola A. Blazquez
Universidad Andres Bello
Department of Engineering Science
Chile
1. Introduction
Intelligent Transportation System (ITS) applications such as congestion and traffic
management employ Global Positioning Systems (GPS) technology to collect positioning
data in two or three dimensions of events, incidents, or vehicles. This information is
integrated with Geographic Information Systems (GIS) to determine the roadway upon
which events and incidents occur, point features such as traffic signs are located, or vehicles
are traveling.
Vehicle trajectories displayed on a digital map are not situated on top of the roadway
centerlines, which represent the real world. Therefore, when both GPS measurements and
roadway centerline maps are very accurate, a GPS data point is associated with the nearest
roadway by calculating the minimum perpendicular distance between each roadway
representation and the GPS data point. This process is called “snapping”. Unfortunately, a
spatial mismatch occurs when a GPS data point is snapped to an incorrect roadway
centerline due to roadway network complexities, inadequate GPS data collection
procedures, and lack of accuracy in the digital roadway map and the GPS measurements, or
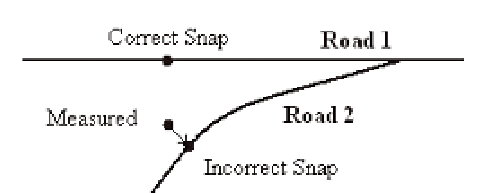
combinations of them (Chen et al., 2005). Figure 1 shows an example where errors in the
location of the measured GPS data point cause an incorrect snap to the nearest road 2
instead of snapping to road 1.
Correct Snap
Road 1
Measured
Road 2
Incorrect Snap
Fig. 1. Measured GPS Data Point with Error Snapped to the Wrong Roadway Centerline
Generally, spatial mismatches or map-matching problems occur at overpasses and
underpasses, converging and diverging roadways such as ramps and divided highways, or
when roads are close together. Figure 2 presents GPS measurements of a vehicle traveling at





Search WWH ::

Custom Search