Global Positioning System Reference
In-Depth Information
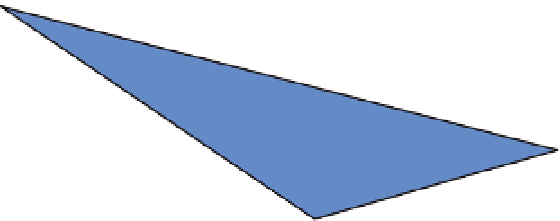
the modelled distance-dependent errors and their actual values. The error planes at the
three shown reference stations are at different levels. The NRTK provides an error surface
formed from the errors at the three reference stations (a plane in this case). The actual
change of error between the reference stations is shown in red. If a user is close to any of the
stations, assuming having the same level of error of that reference station will give
reasonable accuracy and results in small positioning errors at the rover. As the user moves
away from the reference station, the magnitude of the differential error between the actual
and the reference station error level increases. On the other hand, the differential error
between the actual error and the NRTK estimated error, interpolated on the NRTK error
surface at the location of the rover when used, is significantly minimised.
In principle, the RTK network approach consists of four basic segments: data collection at
the reference stations; manipulation of the data and generation of corrections at the network
processing centre; broadcasting the corrections, and finally positioning at the rover utilizing
information from the NRTK. In the first segment, multiple reference stations simultaneously
collect GNSS satellite observations and send them to the control centre, where a main
computer directly controls all the reference stations, mostly via the Internet. All reference
stations should use geodetic-grade multi-frequency GNSS receivers. The incoming GNSS
observation data from all operating reference stations are screened for blunders and next
their ambiguities are fixed. The control computer uses these data in processing a networking
solution, and the data are archived for post-processing use. The network information are
then broadcast to users. The network information depends on the processing algorithm and
may include any of the following: observations from one reference station (physical or
virtual), coefficients for interpolation of corrections within the coverage area, and
observation corrections at a group of reference stations. To increase reliability, it is
recommended to let a second computer work in real time as a backup to the main computer
in the event of any malfunctioning.
NTRK error surface
(plane for 3 stations)
Ref1
change of
actual
error
Error
Ref3
actual
error at
rover
error at
Ref1
Ref2
Ref3
error at
error at
Ref2
Rover
Distance
Fig. 1. Relationship between errors in a small NRTK coverage area



















Search WWH ::

Custom Search