Global Positioning System Reference
In-Depth Information
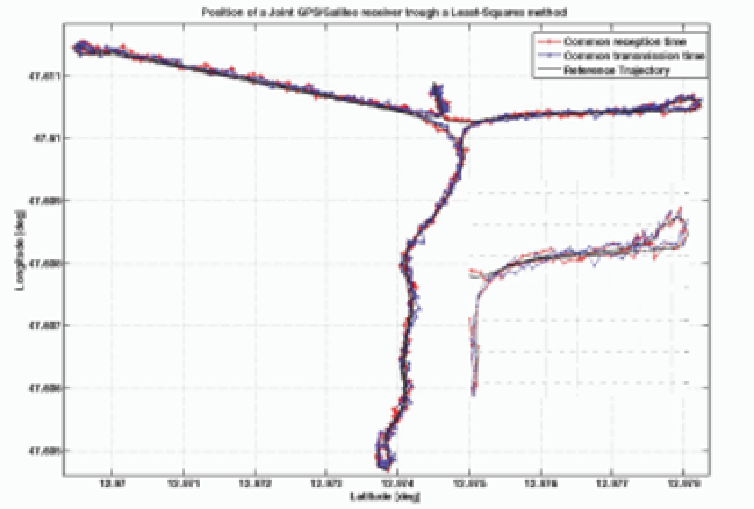
An example of position estimation using the LS method is reported in Fig. 10. The LS
algorithm have been run on the data sets of pseudoranges computed according to the two
techniques and using both real GPS and simulated Galileo satellite signals.
Position of a Joint GPS/Galileo receiver trough a Least-Squares method
Common reception time
Common transmission time
Reference trajectory
47.611
47.61
47.609
47.608
47.607
47.606
47.605
12.97 12.971 12.972 12.973 12.974 12.975 12.976 12.977 12.978
Latitude [deg]
Fig. 10. PVT solution for a joint GPS/Galileo receiver by using “common reception time”
and “common transmission time” for the pseudoranges computation and a LS-based
receiver
As expected, the trajectory of the user estimated by the two methods does not significantly
differ and the variance of the positioning error along the three axis X,Y,Z has the same
magnitude in both cases. This fact proves once again the benefit of using a unique time of
reception, which is particularly suitable without affecting the position accuracy.
6. Conclusion
In this chapter we have examined the GPS code-phase measurements in order to compute
precise satellite-user ranges and to estimate the receiver's position accurately. Since the
clocks on board of the satellites are not synchronized with the clock of the receiver,
measures of code phase gives pseudoranges instead of ranges. Then, by limiting the
discussion only at the pseudoranges computed through the code-phase estimation, two
different methods have been presented. The former considers that all the satellites are
synchronized and each navigation message is received by the user at different time instants.
Therefore, measuring the time offset among all the channels and assigning a nominal travel
time to the closest satellite, we are able to calculate the pseudoranges. On the other hand, the
latter technique foresees the measure of time delays by fixing a common reception time over
all the receiver channels. The first method is the most intuitive and didactic, while the
second is more suitable for real-time implementations and is often employed in commercial


Search WWH ::

Custom Search