Digital Signal Processing Reference
In-Depth Information
r
(
t
) =
X
(
t
)
s
(
t
) +
n
(
t
)
s
(
t
)
r
(
t
)
(
b
i
)
(
b
i
)
Transmitter
Channel
Receiver
X
= (
X
(
t-τ
N
), . . . ,
X
(
t-τ
2
),
X
(
t-τ
1
))
T
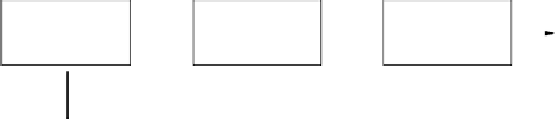
FIgure 3.4
A block diagram of the system, where (
b
i
) is the sequence of information bits to be
transmitted across the channel,
s
(
t
) =
Σ
k
= - ∞
s
k
p
(
t
-
kT
s
) is the transmitted signal,
r
(
t
) is the received
signal,
n
(
t
) is additive white Gaussian noise,
ˆ
is the vector of outdated channel measurements,
and (
ˆ
i
) is the sequence of information bit estimates output from the receiver.
1
=
E
N
σ
ε
2
p
0
in each of the in-phase and quadrature components. For example, such would be the
case in an adaptive system employing pilot symbol-assisted modulation (PSAM) [12]
with a pilot symbol energy of
E
p
[7, 24].
Note that the model in Figure 3.4 captures the critical issue of delay in the feedback
path from the receiver to the transmitter, since the most recent estimate is assumed to
have been made τ
1
seconds ago. In other words, the “outdated” nature of the estimates
takes into account this key implementation issue in adaptive communications systems.
Denoting
Y
as the magnitude of the fading that multiplies
s
k
in the matched filter
output for the
k
th
symbol and using the fact that linear functionals of a Gaussian random
process are jointly Gaussian,
Y
is Rician when conditioned on the vector
ˆ
, with prob-
ability density function [25]
22
2
ys
+
y
e
−
ys
( )
=
0
(3.2)
pyx
|
2
σ
I
,
y
≥
,
|
ˆ
0
YX
2
2
σ
σ
where
I
0
(·) is the zero-order modified Bessel function. Using the assumption that
X
(
t
)
can be assumed constant over the support of
p
(
t
) and normalizing the fading such
that
E
[(
X
R
(
kT
s))
2
] =
E
[
X
I
(
kT
s
))
2
] = 1 (note that this simplification will make the average
received energy twice that provided by simply the path loss and shadowing, which will
be accounted for below), the noncentrality parameter in equation (3.2) is given by
2
2
+
+
( )
+
( )
−
1
−
1
2
T
2
T
2
s
=
ρ
Σ
σ
I
x
ρ
Σ
σ
I
x
,
(3.3)
X
∈
N
R
X
∈
N
I
where
I
N
is an
N
by
N
identity matrix. The (
m
,
n
)
th
element of Σ
x
, the
N
by
N
autocorrela-
tion matrix of the in-phase component of
ˆ
when the channel estimates are noiseless,









Search WWH ::

Custom Search