Digital Signal Processing Reference
In-Depth Information
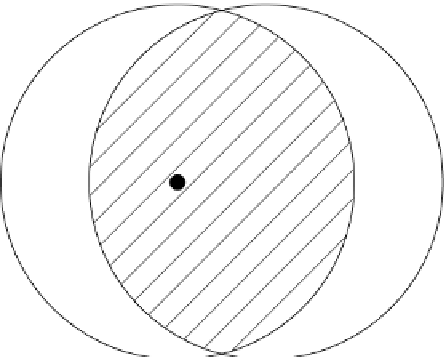
Receiver-only
synchronization
Region of pairwise sync.
(
Node P and Node A
)
Sender-Receiver
Synchronization
(2-Way Message Exchanges)
B
P
A
Parent node
FIgure 13.1
Sender-receiver synchronization and receiver-only synchronization.
T
(P)
T
(P)
3,1
T
(P)
2,
i
T
(P)
3,
i
T
(P)
2,
N
T
(P)
3,
N
Clock
offset
2,1
Node P
P
ˆ
(AP)
o
ˆ
(BP)
Node A
A
o
T
(A)
1,1
T
(A)
4,1
T
(P)
2,1
T
(A)
1,
i
T
(A)
4,
i
T
(P)
2,
i
T
(A)
1,
N
T
(A)
4,
N
T
(P)
2,
N
Node B
B
T
(B)
2,1
T
(B)
2,
i
T
(B)
2,
N
D
i
D
N
FIgure 13.2
Clock synchronization model of SRS (node P and node A) and ROS (node B).
are divided into two parts: the fixed portion
d
and the variable portion
X
i
. The variable
portion of delays depends on various network parameters (e.g., network status, traf-
fic, etc.) and setup, and therefore no single delay model can be found to fit for every
case. Thus far, several probability density function (PDF) models have been proposed
for modeling random delays, the most widely deployed ones being Gaussian, Gamma,
exponential, and Weibull PDFs [20, 21]. The Gaussian delay model is appropriate if the
delays are thought to be the addition of numerous independent random processes. In
[18], the chi-squared test showed that the variable portion of delays can be modeled as
Gaussian distributed random variables (RVs) with 99.8% confidence. On the other hand,
a single-server M/M/1 queue can fittingly represent the cumulative link delay for point-
to-point hypothetical reference connection, where the random delays are independently
modeled as exponential RVs [22]. Thus, we assume the random portions of delays are
either normal or exponentially distributed RVs.






















































































Search WWH ::

Custom Search