Travel Reference
In-Depth Information
a
b
c
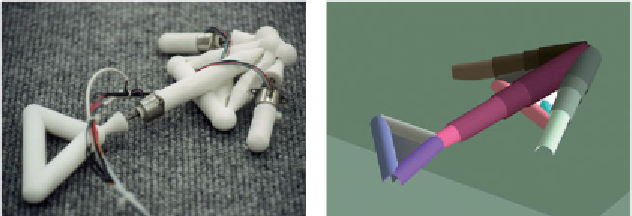
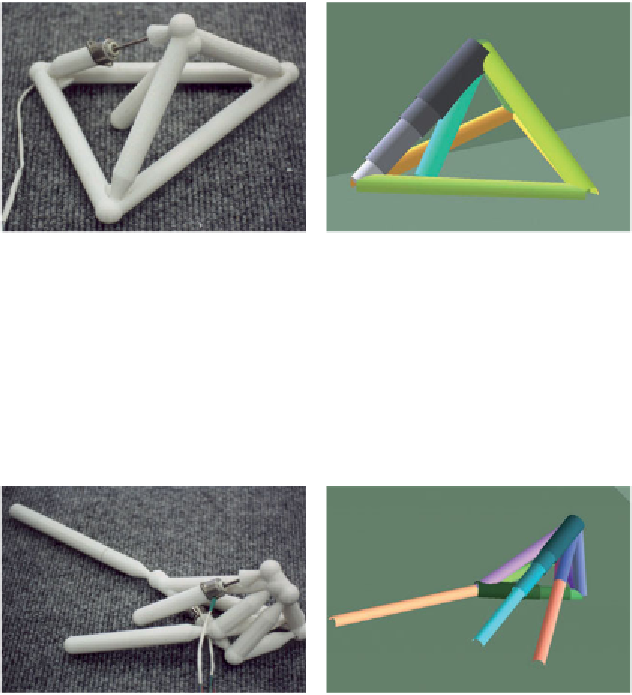
Figure 21
Some of the more successful robots that were produced by artifi cial selection in
the computer world of Lipson and Pollack. The creatures generated by the computer program
are on the right, and on the left are real models of them that turned out to be equally success-
ful in moving across a fl at surface. Note that creature (b) is clearly bilaterally symmetrical, a
body plan that took minutes to emerge in the computer but may have taken millions of years to
emerge in the Precambrian seas! (From Figure 5 of Lipson and Pollack,
Nature
406 (2000): 974-
8.) © Hod Lipson and Jordan B. Pollack, Brandeis University
hobbled along by extending and contracting itself like a distorted inchworm.
When the experimenters constructed real models of these virtual organisms,
the models were able to move swiftly across a real surface.
One striking feature of this strange menagerie was how often these vir-
tual creatures “evolved” a head and a tail end and bilateral symmetry. Like