Biomedical Engineering Reference
In-Depth Information
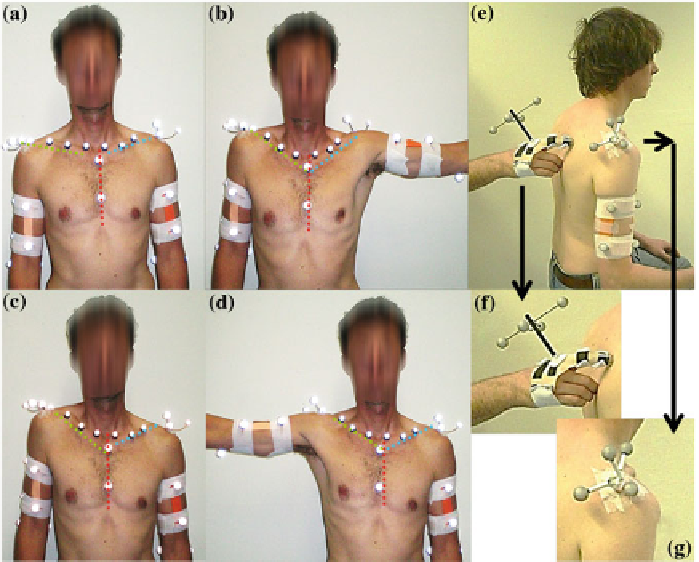
Fig. 9.3
ShRm data collection.
a
-
d
gross shoulder behavior observed in-vivo.
e
,
f
use of reflec-
tive markers for TF building and AL calibration. The images showing the shoulder behavior (
a
-
d
)
illustrate the non-unique spatial relationships between humerus and the other shoulder girdle com-
ponents, i.e. clavicle and scapula (
a
neutral position.
b
subject's right shoulder performing a vertical
translation, while the left shoulder is performing abduction.
c
right shoulder elevation with vertical
translation.
d
right shoulder elevation with abduction). Note that the entire shoulder girdle shows
a similar elevation during vertical translation (
c
) and abduction (
d
). This is due to the fact that the
humerus intimately follows clavicle displacements due to joint ligament tension.
Red line
: verti-
cal through the sternum;
green line
: runs through right clavicle longitudinal axis;
blue line
: runs
through left clavicle longitudinal axis.
e
calibration of shoulder ALs using the A-palp palpation
protocol [
50
].
f
finger gauntlet that allows natural AL calibration using finger palpation instead of
an artificial pointer, such as in the CAST protocol [
60
].
g
specially designed marker cluster glued
on the scapula acromion; the AL calibrated using the A-palp protocol is defined in the local TF
built from these clusters
a quality check of the results through visual feedback obtained in a tailored 3D visu-
alization application (called lhpFusionBox). This control allows improving the final
results of the ShRm reconstruction substantially by comparing the motion obtained
from proper data collection with predicted motions from modeling activities.
To improve in-vivo data obtained from skin mounted TFs, several groups pro-
posed the use of a so-called “scapula locator” used for AL location and calibration
[
6
,
34
,
36
-
38
,
41
-
49
]. The reported results show that such procedure can be useful
especially when the subject's range-of-motion is close to the physiological limit. We
did not adopt such locator in our protocol because measurements relied on the use