Biomedical Engineering Reference
In-Depth Information
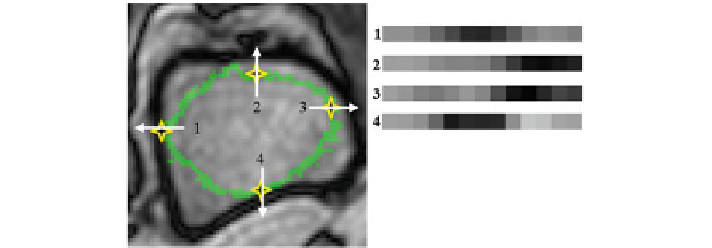
Fig. 4.5
Example of intensity profiles sampled in an MR image of the femur
4.7.2.2 Multiscale Gaussian Potential Force
The Gaussian Potential Force is designed to attract a model towards image features
and is defined as
2
F
g
(
x
)
=
α
g
|ⓦ[
G
σ
(
x
)
∗
I
(
x
)
]|
(4.19)
with I(x) the intensity image,
G
the
convolution operator. This force has been extended by Terzopoulos et al. [
100
]to
a multi-scale scheme. To overcome the need of an initialization close to the final
contour, they propose to use a large initial value of s to broaden the search space.
Once equilibrium has been reached,
σ
(
x
)
a Gaussian function,
α
g
a weight and
∗
could be decreased to maintain the accuracy
of the original approach. Until now, no criterion has been established to determine
when to reduce
σ
σ
, limiting the utility of the multi-scale gaussian potential force.
4.7.2.3 Distance Potential Force
To extend the attraction range, Cohen and Cohen [
57
] have proposed to use a dis-
tance map in 1993. The values in this map are obtained by using either the Euclidian
distance [
101
] or Chamfer distance [
102
] to calculate the distance between a voxel
and the closest boundary point.
4.7.2.4 Dynamic Distance Force
This force extends the distance potential force to include a larger spatial area around
the surface [
103
,
104
]. The dynamic distance has improved handling of boundary
concavities. It is calculated by examining the image for features or gradients along
the surfaces normal. The maximal search distance is limited by a threshold
D
max
.
D
)
D
max
(
x
F
dynamic
(
x
)
=
α
d
n
(
x
)
(4.20)