Game Development Reference
In-Depth Information
Linear Coordinate Transformation
The relation between
x
o
and the corresponding
x
w
can be expressed as:
w
w
o
o
w
o
x
=
R
x
+
t
,
(1)
(
)
w
o
where the rotation matrix
R
=
R
φ
,
ϕ
,
ψ
and the translation vector
[
]
T
t
determine the
pose
(including position and orientation) of
the OCS in the WCS.
w
o
w
o
w
o
w
o
=
x
y
z
is defined as the product of three separate rotations
around the respective axes, that is,
R
w
o
()
()
()
w
o
. Equation 1 is
a rigid body transformation, in which only rotation and translation are permitted,
but scaling is not allowed (
Euclidean geometry
). This kind of transformation is
called
Euclidean transformation
.
A similar relation exists between
x
w
and the corresponding
x
c
:
R
=
R
ψ
⋅
R
ϕ
⋅
R
φ
z
y
x
()(
)
T
x
w
=
R
w
c
x
c
+
t
w
c
or
c
w
c
w
w
c
(2)
x
=
R
x
−
t
(
)
w
c
where the rotation matrix
R
=
R
α
,
β
,
γ
and the translation vector
[
]
T
=
t
determine the pose of the CCS with respect to the WCS.
They actually represent the
extrinsic parameters
of the camera. And they have
in total six
degrees of freedom
(DOFs).
w
c
w
c
w
c
w
c
x
y
z
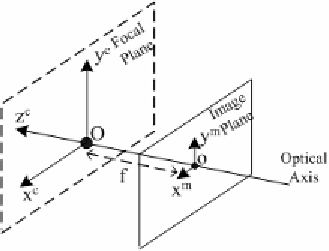
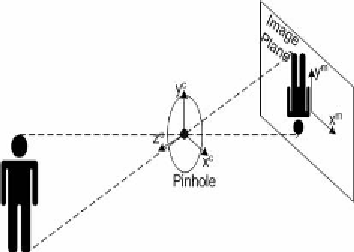
Figure 1. The pinhole camera model.
(b) The principle of a pinhole
projection
(a) Relation between a CCS and
the corresponding PCS
(a) Relation between a CCS
and the corresponding PCS.
(b) The principle of a
pinhole projection.


Search WWH ::

Custom Search