Game Development Reference
In-Depth Information
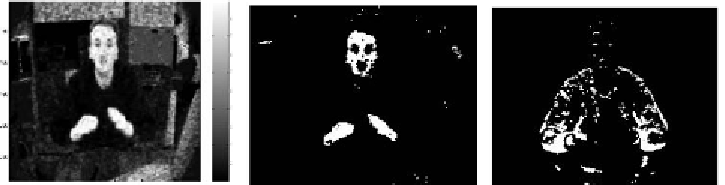
Figure 16. Skin
color probability
for the input image.
Figure 17. Initial
color mask created
with skin detection.
Figure 18: Initial
motion mask (after
pixel difference
thresholded to 10% of
max.).
Figure 19. Moving
hand segments after
morphological
reconstruction.
Figure 20. Tracking
of one hand object
in the “lift of the
hand” sequence.
Figure 21. Tracking
of both hand objects
in the “clapping”
sequence.
between two frames is performed on the color mask and is based on object
centroid distance for objects of similar (at least 50%) area (Figure 20). In these
figures, crosses represent the position of the centroid of the detected right hand
of the user, while circles correspond to the left hand. In the case of hand object
merging and splitting, e.g., in the case of clapping, we establish a new matching
of the left-most candidate object to the user's right hand and the right-most object
to the left hand (Figure 21).
Following object matching in the subsequent moving skin masks, the mask flow
is computed, i.e., a vector for each frame depicting the motion direction and
magnitude of the frame's objects. The described algorithm is lightweight,
allowing a rate of around 12 fps on a usual PC during our experiments, which is
enough for continuous gesture tracking. The object correspondence heuristic
makes it possible to individually track the hand segments correctly, at least during
usual meaningful gesture sequences. In addition, the fusion of color and motion

Search WWH ::

Custom Search