Information Technology Reference
In-Depth Information
- the drivers (by their actions on commands, their postures or visual strategies,
etc.) and the vehicle (its speed, lateral and longitudinal accelerations, position in the
lane, or possible malfunctions of the vehicle itself or some of its components, such
as the state of the tires in the event of a puncture).
sensors
Other sources
of information
(Traffic Control,
infrastructure,
vehicles...)
DRIVER
Driver's behavior parameters
Driver Data
fusions
CO-PILOT
Perceptive
Sensors :
Model(s)
of Situation
Model(s)
of Driver
Human-Machine
Interface
Cameras
Radar
Diagnosis
Telemeter
Centralized Manager
of H-M Interactions
etc.
Car Control
Functions
fusions
Vehicle Data
Vehicle parameters
Aid
Systems
VEHICLE
sensors
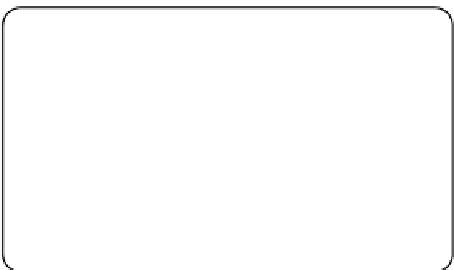
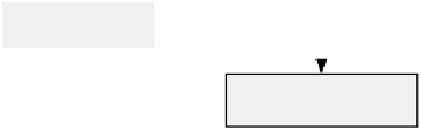
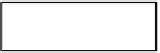
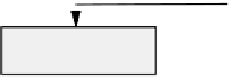
Figure 5.6.
Generic architecture of an automobile copilot (inspired by [BEL 03])
The copilot
outputs
can be based on the diffusion of information and/or
warnings (via
human-machine interfaces
)
or require the direct intervention of
automaton on the vehicle controls (via the
control-command
functions).
As for the heart of the device, it is made up of one (or several)
model(s) of the
situation
,
in charge to represent the human driver in the machine. These models
must be elaborated or updated in real time, based on information coming from the
environment and the vehicle. They constitute the main foundation for the
elaboration of a
common frame of reference
between the driver and the automaton.
A copilot must also have
centralized management of human-machine
interactions.
This module - based on the
common frame of reference
and/or
diagnosis
functions
that come from the analysis of human and situational reflections
- would then have the main function of ensuring the coordination and adaptation of
assistance with regards to the state, the difficulties encountered and the specific
needs of the human driver at the time. Home of the
knowledge of how to cooperate
,