Graphics Programs Reference
In-Depth Information
x
x
y
y
z
z
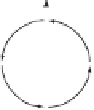
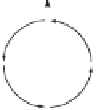
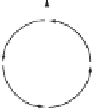
Figure 1.25: Direction of Three-Dimensional Rotations.
counterclockwise rotation. To achieve clockwise rotation, either use a negative angle or
the inverse of the rotation matrix. Inverting our rotation matrices is especially easy and
requires only that we change the signs of the sine functions.
Example
. Consider the following compound transformation: (1) a translation by
l
,
m
,and
n
units along the three coordinate axes, (2) a rotation of
θ
degrees about the
x
axis, (3) a rotation of
φ
degrees about the
y
axis, and (4) the reverse translation. The
four transformation matrices are
⎛
⎞
⎛
⎞
1000
0100
0010
lmn
1
10 00
01 00
00 10
−
⎝
⎠
⎝
⎠
T
r
=
,
T
rr
=
,
l
−
m
−
n
1
⎛
⎝
⎞
⎠
⎛
⎝
⎞
⎠
1
0
0
0
cos
φ
0
−
sin
φ
0
0
θ
sin
θ
0
0
1
0
0
R
x
=
,
R
y
=
.
0
−
sin
θ
cos
θ
0
sin
φ
0
φ
0
0
0
0
1
0
0
0
1
Their product equals the 4
×
4matrix
T
=
T
r
R
x
R
y
T
rr
⎛
⎞
cos
φ
0
−
sin
φ
0
⎝
⎠
sin
φ
sin
θ
cos
θ
cos
φ
sin
θ
0
cos
θ
sin
φ
−
sin
θ
cos
φ
cos
θ
0
−
l
+
l
cos
φ
+
m
cos(
φ
m
+
m
cos
θ
−
−
[
−
2
n
+
n
cos(
φ
θ
)
+
n
cos(
φ
+
θ
)
−
−
1
=
.
−
θ
)
/
2
−
m
cos(
φ
+
θ
)
/
2
+
n
sin(
φ
n
sin
θ
2
l
sin
φ
θ
)
/
2
+
n
sin(
φ
+
θ
)
/
2
−
θ
)
+
m
sin(
φ
+
θ
)]
/
2
−
m
sin(
φ
−
Substituting the values
θ
=30
◦
,
φ
=45
◦
,and
l
=
m
=
n
=
−
1, we get the 4
×
4 matrix
⎛
⎞
0
.
7071
0
−
0
.
7071
0
⎝
0
.
3540
0
.
866
0
.
3540
0
⎠
T
=
.
0
.
6124
−
0
.
50
0
.
6124
0
−
0
.
673
0
.
634
0
.
7410
1







Search WWH ::

Custom Search