Graphics Reference
In-Depth Information
• Hind left leg is now swinging forward of the halfway position.
• Hind right leg continues to support the animal's rear end and has moved
backward of the upright position.
The sequence is now complete and the movement progresses from Phase Six
back to Phase One, thereby completing the cycle.
During a walk, a quadruped is supported on either two or three legs at any
one time. Unlike a run cycle, at no point are both front legs and both hind legs
off the ground at the same time.
The Noncursorial Walk
The walking gait of a noncursorial animal is due to the manner in which the legs
are held away from the body. Noncursorial animals demonstrate greater lateral
movement of the spine, creating distinct and exaggerated curves during the
walk. The twist in both the upper body at the shoulders and the lower body at
the hips in noncursorial animals is much more pronounced than that of cursorial
animals. While the shoulders are oriented in one direction, there is a twist in the
orientation of the pelvis in the opposite orientation, creating a bend in the spine.
Trotting
Trotting is a gait in which the animal is moving at a moderate speed—faster than
a walk and slower than a full gallop. This gait is sometimes used as a transitional
stage between walking and running if the transition is not a rapid one and is
extended over time. During a trot diagonally opposite legs are synchronized and
moved in phase with one another; the front left leg and hind right leg form one
pair, and the front right and hind left form the other pair. Once again, there is no
particular starting point in this sequence that works as a cycle.
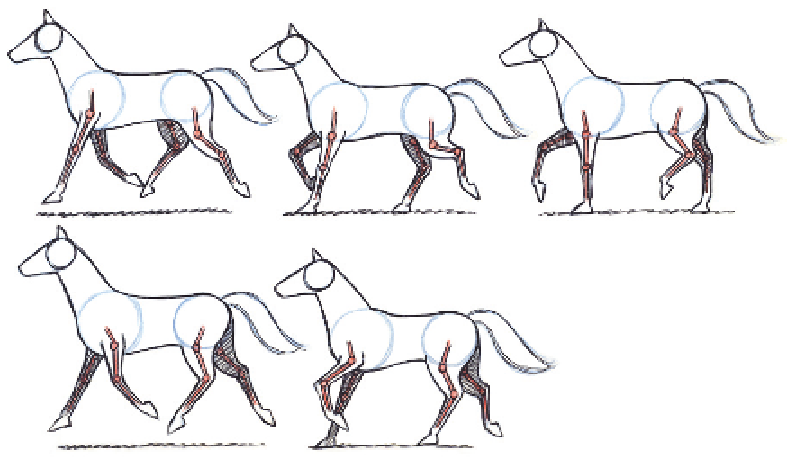
FIG 4.28
A quadruped trot cycle that illustrates the suspension phase in which all four feet are off the ground.