Biomedical Engineering Reference
In-Depth Information
12
laser
Δ
x
1
2
d
3
4
photodetector
array
Δ
z
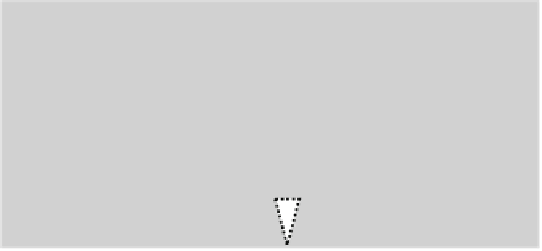
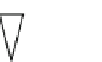
Fig. 3.4
The optical lever detection of AFMs
Optical interferometry techniques are among the most sensitive techniques ever
known (
Sarid 1994
). The most common sensing part of an AFM is an optical lever,
illustrated in Fig.
3.4
, which measures the light deflected of the back of a vibrating
cantilever with the help of a photodetector (PD) array consisting of two or four PDs.
The signal difference between the PDs in the array is processed, amplified, and sent
to the AFM feedback system.
If the sensing array consists of two PDs, the current difference between them is
I
D
I
2
I
1
/
Lx
N
0
/
d
z
N
0
(3.7)
where L is the length of the cantilever and N
0
denotes the number of photons in the
laser beam.
In the case of a sensing system with four PDs, which prevents the effects
generated by the lateral forces that could damage the cantilever, the AFM computer
is considering the following signals:
normal force
/
Œ.I
1
C
I
2
/
.I
3
C
I
4
/;
(3.8a)
lateral force
/
Œ.I
2
C
I
4
/
.I
1
C
I
3
/:
(3.8b)
The sensitivity of the optical lever system is given by 2
WI
laser
=.
mW
rad
1
/,where
I
laser
and are the intensity and wavelength, respectively, of the laser, and W is the
cantilever width.
The AFM resolution depends on the mechanical properties of the cantilever and
on the tip geometry. The tip is generally fabricated by silicon or silicon nitride
micromachining and has a pyramidal shape with high aspect ratio. Recently, CNTs
with a diameter of a few nanometers, grown directly on a Si cantilever or attached
on its pyramidal tip, are used as sharp AFM tips (
Wilson and Macpherson 2009
).
The AFM resolution is determined also by its mode of operation. For example,
in the contact mode, two peaks are resolved at a minimum separation of 2.D
z
/
where D is the tip diameter and
z
is the minimum measurable depression of the
AFM. Typically, D is 10-20 nm for Si tips and 5-6 nm for CNTs, whereas
z
is a














Search WWH ::

Custom Search