Biomedical Engineering Reference
In-Depth Information
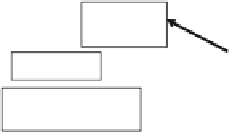
Fig. 3.2
The static AFM
mode
AFM V-shaped
cantilever
surface
Fig. 3.3
The block diagram
of the AFM system
modulator
laser
piezo drive
programmable
functions
optical
detection
lock-in
to computer
feedback signal
(
x
,
y
,
z
) piezo-
translator
In the
tapping mode
, the cantilever touches periodically the sample. The can-
tilever is driven in resonant mechanical oscillation by a piezoelectric crystal, and any
variation in amplitude or phase originating from the periodic tip-surface interaction
is observed. More rigid cantilevers are used in this operation mode, with spring
constants of 20-70 Nm
1
, and higher oscillating amplitudes, of 50-120 nm, are
obtained. The amplitude of the tapping cantilever is usually monitored during the
scanning of the surface under study, and a feedback system preserves a constant
deflection at selected points on the surface by controlling the cantilever-surface
distance. The feedback signal adjusts the movement of the cantilever along the
vertical
z
direction for the duration of scanning in the (x,y) plane, so that a
topographical image of the surface is finally obtained. An AFM block diagram,
valid for all three modes of operation, is represented in Fig.
3.3
.
There are several websites that host AFM images, which demonstrate the
unprecedented capabilities of AFM “to see” atoms and surface structures of many
materials, including biological materials. Two such websites are:
The main component of an AFM system is the sensor, which detects the weak
cantilever deflections reaching values below 0.1 nm in the static mode, as discussed
above. Because of their simplicity and effectiveness, the optical detection systems
are the most widespread.






























Search WWH ::

Custom Search