Biomedical Engineering Reference
In-Depth Information
E
x
tensor
D
igitorum
2
0
-2
0
0.5
1
1.5
2
2.5
3
3.5
4
x 10
4
Abd
u
ctor Po
l
licis Br
e
vis
2
0
-2
0
0.5
1
1.5
2
2.5
3
3.5
4
x 10
4
Hand grasp
Hand
opening
Po
si
tion of i
n
dex fin
g
er
100
50
0
0
0.5
1
1.5
2
2.5
3
3.5
4
x 10
4
Time (ms)
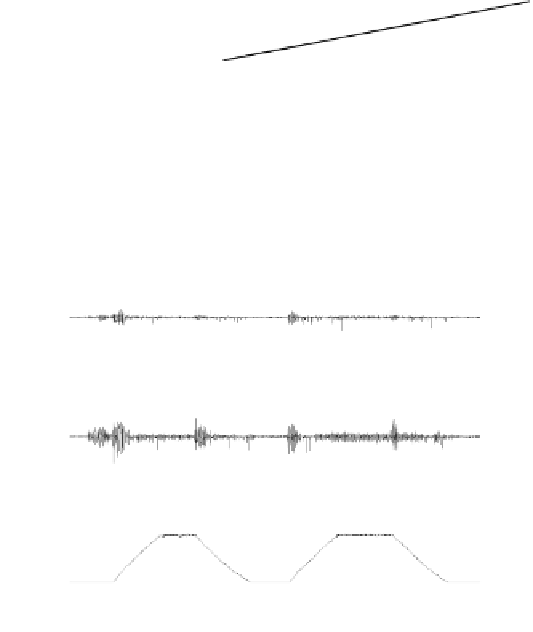
Figure 6.11b
Continuous passive motion (CPM) for stroke subject S4. Top 2 rows are the
EMG signals for ED and APB muscle groups. The bottom row is the position feedback of
index finger movement.
Extensor Digitorum
2
0
-2
0
0.5
1
1.5
2
2.5
3
3.5
4
x 10
4
Abductor Pollicis Brevis
2
0
-2
0
0.5
1
1.5
2
2.5
3
3.5
4
x 10
4
Hand grasp
Hand
opening
Po
si
tion of
in
dex fin
g
er
100
50
0
0
0.5
1
1.5
2
2.5
3
3.5
4
x 10
4
Time (ms)
Figure 6.11c
EMG-triggeredmotion for elderly subject E4. Top 2 rows are the EMG signals
for ED and APB muscle groups. The bottom row is the position feedback of index finger
movement.
hand opening or hand grasp tasks, showing that the stroke subject might have
difficulty in muscle coordination when controlling these two muscle groups and
cocontraction was observed.
6.4.2 Maximum Voluntary Force Analysis
Figure 6.12
shows the comparison charts of the maximum voluntary contraction
forces of all fingers between the stroke and elderly groups. In both hand closing
and hand opening tasks, stroke subjects had weaker finger forces than elderly