Biomedical Engineering Reference
In-Depth Information
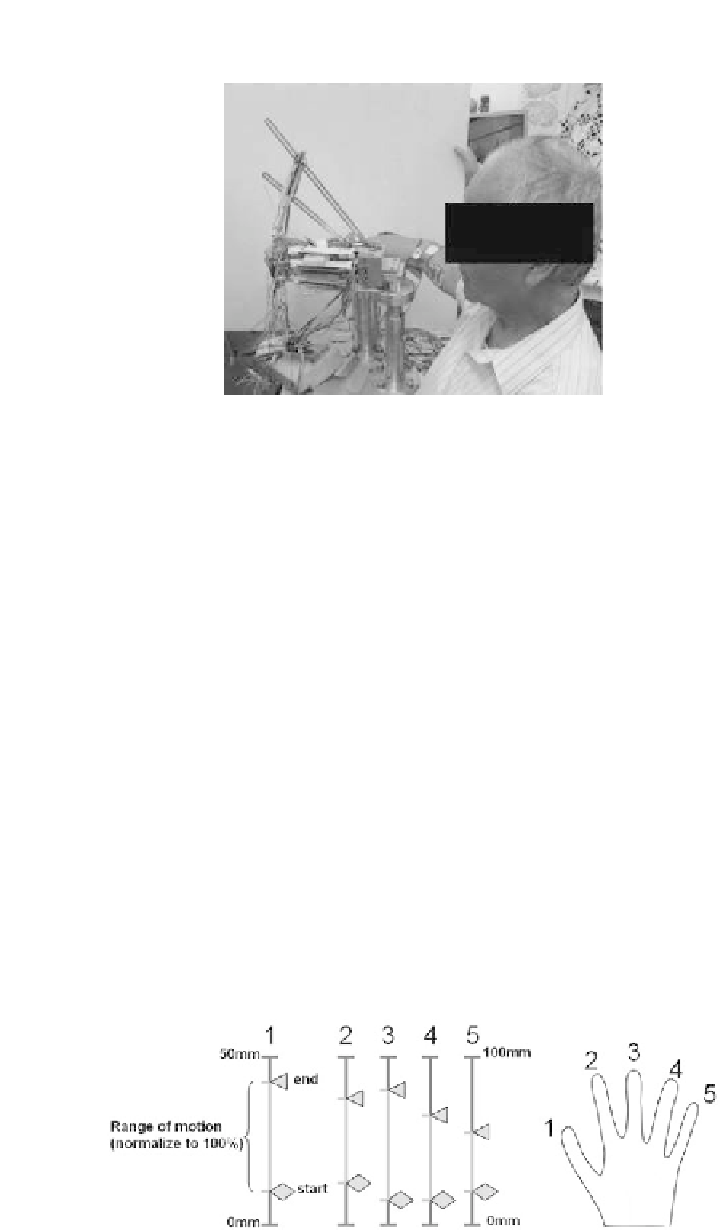
Figure 6.6
Experimental setup with an elderly subject.
measurement of the finger force would be generated from fingers only. Poles were
adjusted to align the finger tips with the actuators. The actuator for the thumb
was adjusted to provide the pinch movement.
Figure. 6.6
shows the experimental
setup for the right hand with one of the elderly subject.
6.3.1 Calibration of Range of Motion
Range of motion (ROM) measurements were required at the beginning of the
evaluation, as individual's finger length and hand size was different. The travel
range of each actuator needs to be adjusted to match the ROM of the corresponding
finger. The range limit of each actuator was recorded and set for the hand opening
and hand grasp during the training. As the travel distance of the finger tip varies
according to the finger length, in order to align all the fingers for easier control, the
ROM of each finger would be normalized to 100 percent according to the measured
distance range (see
Figure 6.7
)
. After normalization, maximum flexion limit is
mapped to 0%, and maximum extension limit is mapped to 100%.
Figure 6.7
Calibration for the range of motion. The range of motion is represented by the
space between the maximum flexion limit and the maximum extension limit.