Biomedical Engineering Reference
In-Depth Information
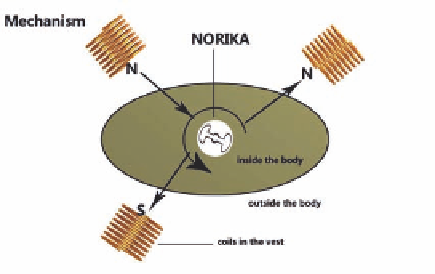
Figure 13.8
Conceptional description of external rotation mechanism for NORIKA capsule
permanent magnets. Many research groups and companies have been trying to
incorporate the magnetic actuation mechanisms into the capsule design.
Since 1998, RF System Lab has been working on NORIKA capsule endoscope
system (Uehara
et al.
2003), which includes a 9 mm
×
23 mm capsule, an external
controller, a transmitter vest and a workstation. The capsule is externally powered
by wireless power transmission. It integrates a CCD image sensor with the digital
signal processor (DSP) separated from CCD by microwave and moved outside
body, which can save 94% of the total internal power. NORIKA has a rotation
feature to gain some level of control. A schematic drawing of the working principle
while another three coils embedded in a vest-like jacket act as stators. When
the charged energy in the capacitor is quickly released to the rotor coil, a strong
magnetic force is generated within a short time so as to rotate the capsule. The
rotation direction is decided by the stator's magnetic field direction.
Sayaka supersedes the basic technology of NORIKA. Its camera has been
moved to the side of the capsule to provide a better view of the intestinal walls.
In addition, the camera can spin as the capsule passes through the digestive tract,
thanks to Sayaka's small permanent magnets and an electromagnet which causes
“stepping rotation”. The NORIKA/Sayaka capsule is still under development and
may need more years before entering the market.
Besides the rotation of the cameras inside the capsule by magnetic force, the
researchers are also endeavor to manipulate the body of the capsule magnetically.
Sendoh
et al.
(2003) enclosed an axially magnetized permanent magnet inside a
capsule with a spiral structure and rotated the capsule by applying an external
rotational magnetic field; and thus the spiral shape generated a linear movement,
in this mechanism by control of the rotating direction. This idea has been one
instance of Olympus's conceptual capsule navigation system, which could control
the position, orientation and posture of the permanent magnets built in the capsule
by an external magnetic field generator (Kusuda 2005).