Biomedical Engineering Reference
In-Depth Information
0DQGLEOH ZLUHV
7RQJXH ZLUHV
&RPPRQZLUHZLUHV
0DQGLEOHDQG7RQJXH
7RWDO
7RWDO
7RWDO ZLUHV
ZLUHV
a)
b)
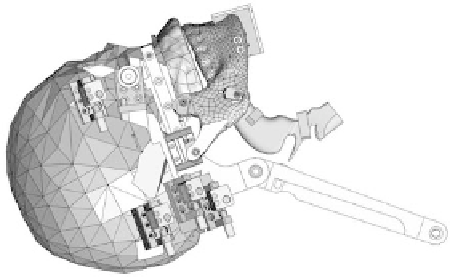
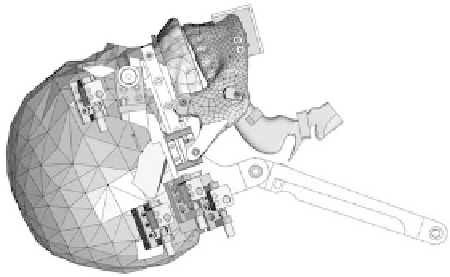
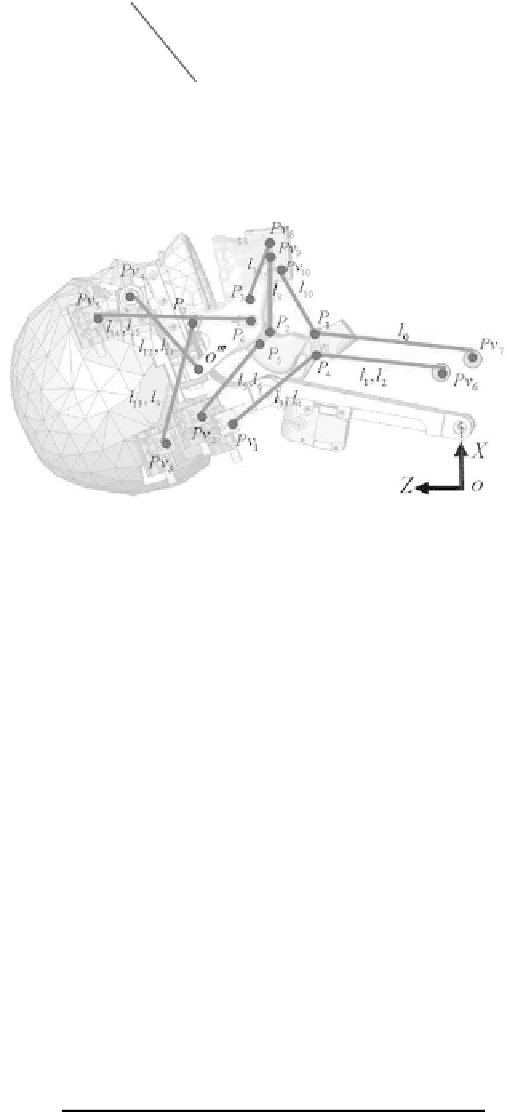
Figure 12.8
Detail of the proposed Airway Management Training System:
(a) wiring
mechanism; (b) kinematic analysis. For color reference, see page 221.
wires were connected between the mandible and tongue. For the kinetic axis, we
attached two linear guides. On the linear guide, we also attached a rotational axis.
Regarding the control positioning of the tongue, we considered three points:
tongue bone, center point of tongue, and tip of the tongue. The actuation mech-
anism of the tongue is composed by six wires attached to the tongue bone (three
on the center point of the tongue and one on the tip of the tongue). As we have
previously mentioned, three of those wires are common to the mandible, so the
motion of the tongue and mandible are dependent. On the other hand, the control
positioning of the tongue is done by controlling the position of the tongue bone.
Therefore, the shape of the tongue was implemented by controlling the center
point and tip. Of course, the control positioning of the center point and the tip
of the tongue are dependent on the position of the tongue bone. As a result,
by modifying the shape of the tongue, we may reproduce the space area of the
oral cavity. By defining the position of the mandible, head and tongue; as it is
shown in Fig. 12b, we may compute the length of each wire
l
0
to
l
16
as follows
(
Eqs. 12.2-
12.11
)
:
2
2
2
l
0
=
(
Pv
7
x
−
P
1
x
)
+(
Pv
7
y
−
P
1
y
)
+(
Pv
7
z
−
P
1
z
)
(12.2)