Biomedical Engineering Reference
In-Depth Information
Needle
Dummy Skin
Urethane Foam
2[mm]
X1
X2
Z
Z
X
X
Reflective Photo Interrupters
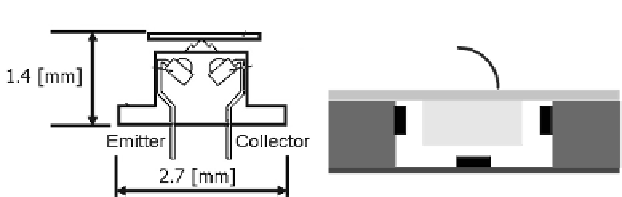
Figure 12.4
Detail of the proposed sensor mechanism to measure the movement of the
skin dummy. An array of photo interrupters is placed in order to detect the deformation of
the urethane foam.
•
Distance between Sutures (I
DbS
)
: The suture distance is measured from one
suture to another applied along the wounded area.
•
Wound Deh i s c enc e ( I
WoD
)
: This parameter measures the open area of the
wound just after the conclusion of the task.
The dummy skin motion tracking has been implemented by attaching ure-
thane foam (10mm of thickness) under a skin dummy made of polyurethane
(Figure 12.4
).
The dummy skin movement can be determined by measuring the
deformation of the urethane foam. For this purpose, arrays of photo interrupters
are place around the foam. Each of the photo interrupters combines a gallium
arsenideinfrared emitting diode (GaAs-IRED) with a high-sensitivity phototran-
sistor. The principle is as follows. The light emitted from the GaAs-IRED is
then reflected by the surface of the foam. The reflected light is then collected
by phototransistor. When the distance between photo interrupter and urethane
foam becomes closer, the volume of the reflected light becomes larger. Thus, the
electric current that flows inside the phototransistor will increase in proportion
to volume of the reflected light. As a result, we can sense the movement of skin
dummy by embedding one photo interrupter under the skin dummy and four
photo interrupters perpendicularly on the sideways.
On the other hand, we have implemented a suture image processing in order
to measure the quality of the suture after the task is completed. For this purpose,
a picture of the suture is taken and processed by using the APIs provided by the
Open Source Computer Vision Library (OpenCV). As a first approach, we have
considered the following physical parameters
(
Figure 12.5
)
:
Equidistance
,
Distance
between sutures
and
Wound Dehiscence
. In order to measure the distance between
sutures, we perform the following steps: at first, we grabbed the image from the
webcam and converted into HSV color space. This facilitates the search of suture
thread (blue color) within the image frame just by scanning the thread blue color
(threshold level) along the horizontal direction. When a blue color is detected
on the HSV color space, the pixel is marked as part of the suture. In order to
determine the suture dimensions and center of mass, the edge detection algorithm
is performed to find the bounding box of the recognized object. By obtaining