Biomedical Engineering Reference
In-Depth Information
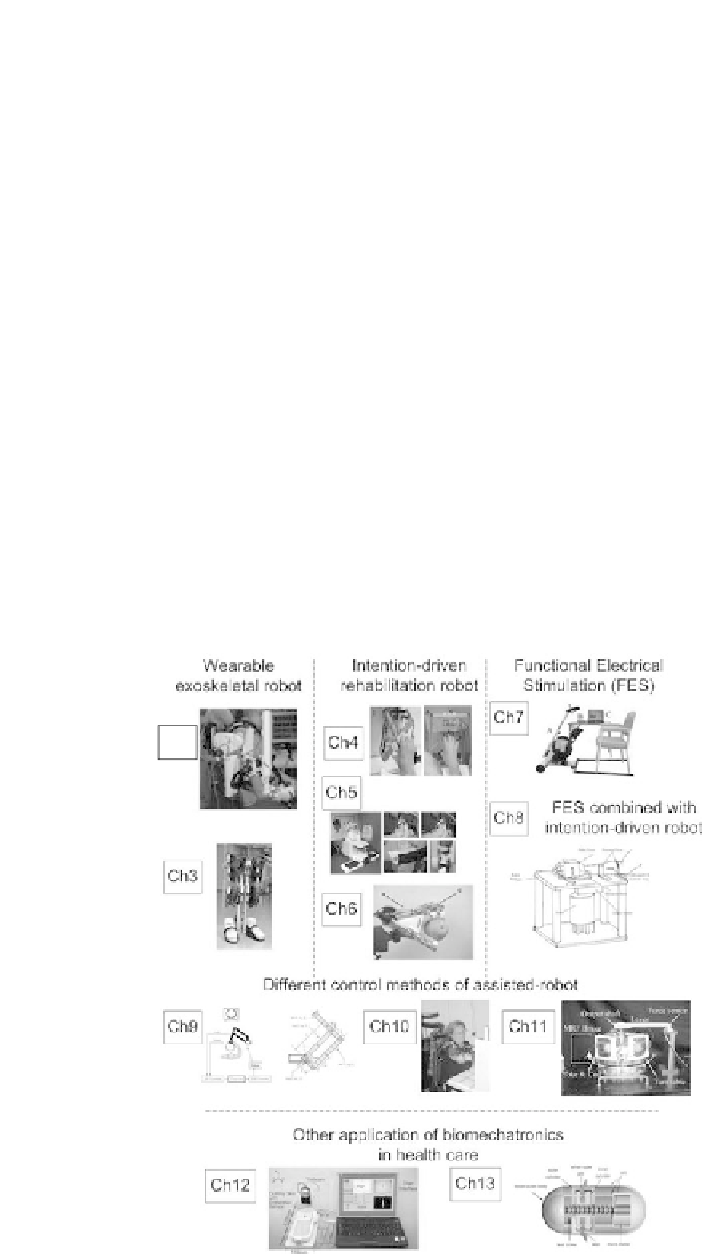
intention-driven control method used in interactive robotic training in stroke. The
development of the robot is introduced first then followed by the evaluation of
the effectiveness of the robot used in elbow training in stroke.
Chapter 6
follows
the interactive robot design, with especially used for hand function improvement
for stroke patients. The next two chapters deal with one of the new technology of
functional electrical stimulation (FES) with
Chapter 7
describing basic knowledge
of FES and then its application in leg exercise and therapy, where
Chapter 8
covering the topic of FES combined with robot system for poststroke wrist training.
Chapter 9
covers the development of robots for active rehabilitation of the upper
limbs on the transverse plan for stroke patients.
Chapter 10
describes a novel
control method with augmented feedback in upper extremity rehabilitation for
stroke and
Chapter 11
describes an application of magnetorheological fluid brake
used in isokinetic and iso-contraction exercise machine. Besides the application
of the biomechatronic robot in rehabilitation training,
Chapter 12
describes this
kind of robotic-assisted technology could also be applied in medical training
purposes. Last but not least,
Chapter 13
covers another application example of
biomechatronic devices with a wireless active capsule endoscope application in
medicine and health care.
:HDUDEOH
H[RVNHOHWDOURERW
,QWHQWLRQGULYHQ
UHKDELOLWDWLRQURERW
)XQFWLRQDO(OHFWULFDO
6WLPXODWLRQ)(6
&K
&K
&K
&K
)(6FRPELQHGZLWK
,QWHQWLRQGULYHQURERW
&K
&K
&K
'LIIHUHQWFRQWUROPHWKRGVRIDVVLVWHGURERW
&K
&K
&K
2WKHUDSSOLFDWLRQRIELRPHFKDWURQLFV
LQKHDOWKFDUH
&K
&K
Figure 1.3
Structure of the topic. For color reference, see page 209.