Biomedical Engineering Reference
In-Depth Information
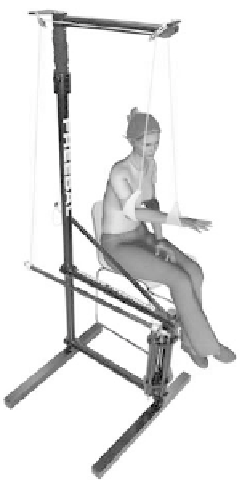
Figure 10.1
Gravity compensation system Freebal. For color reference, see page 219.
paretic arm (Beer 2007, Stienen 2007, Prange 2007). Also muscle activation levels
during reach and retrieval movements with gravity compensation were lower than
during movements without gravity compensation (Prange 2009a). These results
can be explained, due to the reduced activation level of shoulder abductors, by
arm support. As a result, the amount of coupled, involuntary elbow flexion is
reduced, which facilitates elbow extension. Increased individual joint control can
result in an increased range of motion.
Similar results are observed in a training study, where stroke survivors trained
for 6 weeks in a gravity compensated environment. Improvements in unsupported
reaching distance (3.6% of arm length) were observed, accompanied by increased
shoulder elevation angle (up to 17.6 degrees) throughout the reaching movement
and a larger range of elbow extension (up to 24.7 degrees) (Prange 2009b, Housman
2009). Application of gravity compensation is a promising tool for rehabili-tation
therapy.
10.5 AUGMENTED FEEDBACK
Another way of stimulating motor relearning is providing augmented feedback.
Addition of augmented feedback to (robotic therapy) exercises can stimulate the
learning process by making patients more aware of their performance (Winstein
2006).
Augmented feedback is given in addition to intrinsic feedback. Intrinsic
feedback is the sensory-perceptual information from internal sensory processes