Biomedical Engineering Reference
In-Depth Information
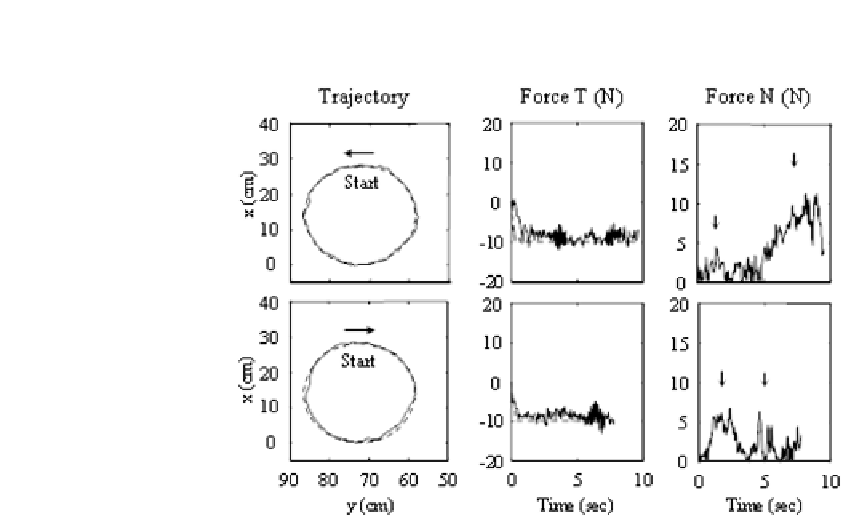
Figure 9.3
Circular active movements against a load of 10 Newtons.
We design three types of movement trajectories, namely, linear, circular and
figure eight. The normal linear movement trajectory is an outward movement
from the chest of 28 cm in length and the oblique linear movement trajectory is
an oblique (45
◦
) outward movement from the chest of 21.2 cm in length. The
circular movement trajectory is a circular movement with a diameter of 28 cm.
The figure-8 movement trajectory consists of two ellipses (14
28 cm) with their
short axes in alignment in radial direction and with opposite moving directions.
Since the movement velocity is not controlled, in the design process a trajectory is
partitioned into 4000 segments by length along the trajectory instead of the lapsed
time (Yoshikawa, 1990). We also used a randomly timed perturbation force to test
the control capability of the subject to maintain the trajectory.
Fig. 9.3
shows example results of circular active movements of a normal
subject against a load of ten Newtons. The trajectory was well maintained with
the position error less than 1.25 cm during the whole trajectory. The control
system kept a resistive load of 10 Newtons. In the third column, the force along
the direction normal to the movement shows that the subject could follow the
trajectory well, except when the subject needed to change direction in the left-right
axis (arrows).
to test the control capability in a normal subject and a stroke patient. The
perturbation imposed a constant force of 7.5 Newtons along the direction normal
to the movement for a fixed interval, as indicated by the dotted wedge. It is clear
that the perturbation caused a larger deviation from the desired trajectory in the
stroke patient.
×