Biomedical Engineering Reference
In-Depth Information
As mentioned in the Introduction, stability is one of the main concern for fuzzy
controllers. The stability of our robot system is investigated by the conventional
describing function analyses. According to Aracil and Gordillo, (Aracil and
Gordillo, 2004) the describing function of the fuzzy force PI-controller can be
defined as
[
C
F
(
a
,
ω
p
+
C
L
(
a
,
ω
p
] ·
e
(
a
,
ω
p,
(9.9)
wheree(a,
ω
pgs assumed to a simple sinusoidal function a
·
sin(
ω
t), both a and
ω
are constants, and
C
L
(
a
,
ω
pg
K
P
+
K
I
/
(
a
·
ω
p,
(9.10)
C
F
(
ω
=
·
(
)+
·
(
ω
)
a
,
pg
g1
sp
a
k
2
si
a
/
/
s
,
(9.11)
min
1,
2
π
sin
−
1
K
P
2
,
1
K
P
a
K
P
a
sp
(
a
)=
a
+
− (
)
(9.12)
min
1,
2
π
sin
−
1
K
I
2
,
1
K
P
a
K
P
a
si
(
a
)=
a
+
− (
)
(9.13)
K
I
and K
P
are the saturation limits of fuzzy logic for integration and proportional
parts, respectively. The condition for the first harmonic balance is 1 + [C
F
(a,
ω
p)
+C
L
(a,
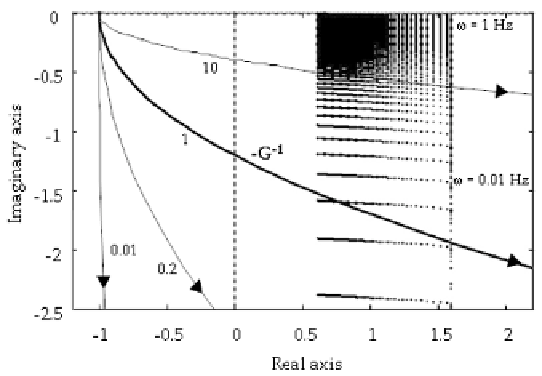
G = 0. The stability of the fuzzy controller is then visualized by
drawing a series of curves of [C
F
(a,
ω
p)]
·
p)] against -G
−
1
. The analyses
shows that, with the implemented fuzzy controller, the robot arm is stable in face
of disturbance of frequencies from 10 to 0.01 Hz and magnitudes from 0.1 to 100 N
maneuver ranges.
ω
p+C
L
(a,
ω
Figure 9.2
Results of describing function analyses.