Biomedical Engineering Reference
In-Depth Information
4
4
ECR&FCR
FCR&TRI
3
3
2
2
1
4
BIC&TRI
ECR&BIC
4
3
3
2
4
4
FCR&BIC
ECR&TRI
3
3
2
2
m5f5
m1f1
m0f1
m0f0
m1f0
m5f5
m1f1
m0f1
m0f0
m1f0
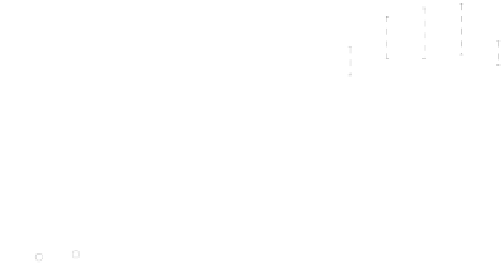
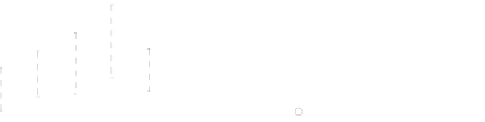
Figure 8.6
The Muscle co-contraction indexes of the muscle pairs during the tracking tasks
with different FES and robot assistive combinations and with different tracking speeds
(circles are for 10
◦
/s, deltas are for 20
◦
/s).
muscles (Hu
et al
. 2007; Hu
et al
. 2008; Hu
et al
. 2009). For an unimpaired
subject, it is expected that the muscles related to the elbow joint should be quite
when doing the wrist tracking. However, for persons after stroke, compensatory
muscle activities related to the proximal joints, such as the elbow and shoulder, are
commonly observed when they are required to conduct wrist movements (Dewald
et al
. 1995; Dewald
et al
. 2001). The results in the system evaluation suggested that
introducing FES could reduce the correlated elbow movements during the wrist
flexion and extension. Chae, J.
et al.
indicated in their study on neuromuscular
stimulation for motor relearning in hemiplegia that electrical stimulation not
only evoked contractions in the paretic muscle, but also stimulate the sensory
feedback in the affected muscle (Chae and Yu 1999; Chae
et al
. 2000), which could
increase the awareness from the subject to use the target muscles, rather than using
compensatory motions from other body parts. The co-contraction between the
ECR&FCR during the tracking could reflect the coordination of the two muscles
in the simple wrist extension and flexion movements. When the tracking speed
was 20
◦
/s, there was almost no difference in the ECR&FCR co-contraction index
among different system assistive patterns. It might be that the target tracking
speed was too fast for the subjects to follow even with the FES-robot assistances.
However, for the 10
◦
/s tracking speed, the ECR&FCR co-contraction index had its
maximal mean value when there was no assistance from the FES-robot (i.e., m0f0);
and the minimal mean value was observed when both FES and robot part give
100% assistance (i.e., m1f1). It suggested that with the assistance of the FES-robot,