Biomedical Engineering Reference
In-Depth Information
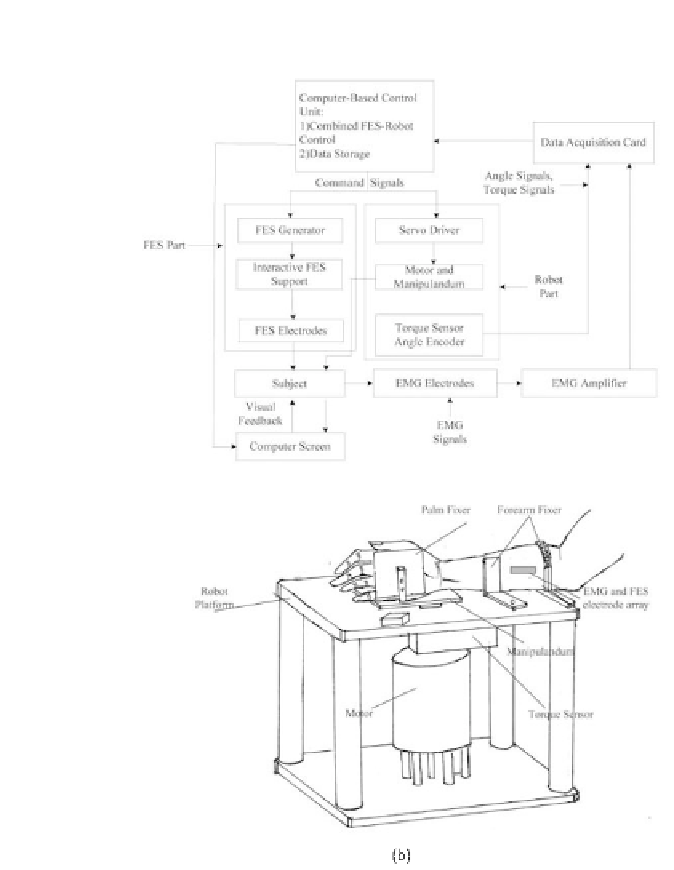
Figure 8.2
The system diagram of the FES-Robot system (a), and an illustration of the
structure for the motor part (b).
manipulandum. A belt was used to fasten the wrist joint in order to keep the joint
position still during palm movement.
The control algorithm for the assistive FES and torque could be described as
follows:
Assistance
FES
−
robot
=
Assistance
Robot
+
Assistance
FES
(8.1)
where, Assistance
FES
−
robot
represented the ultimate support of the FES-robot
system, Assistance
Robot
was the support from the robot part applied to
the manipulandum, Assistance
FES
was the support from the FES part applied to
the FES electrodes. The robotic assistance for the FES-robot systemwas same as the
algorithm for the continuous intention-driven wrist robot introduced in
Chapter 5
.