Environmental Engineering Reference
In-Depth Information
measurements are small relative to the uncertain-
ty associated with the stochastic inputs to the
state equations, then
d
q
should be very much
greater than the observation noise hyper-parame-
ter
b¼
0.01 in Equation 9.11, which defines an
appropriate level of uncertainty on the flow ob-
servations and the associated one-day-ahead fore-
casts. As
d
q
is increased, so the forecasting
performance improves but there is little further
improvement after
d
q
¼
10,000, which is, there-
fore, the selected value. Finally, it was found that a
very small value of
d
¼
10
14
for the parameter
tracking hyper-parameter yielded themost accept-
able tracking results (see 'Comments' below).
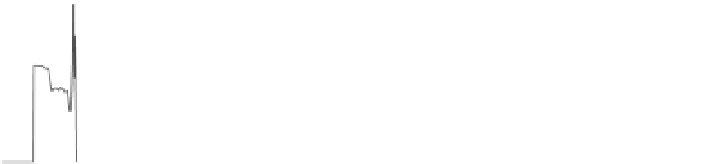
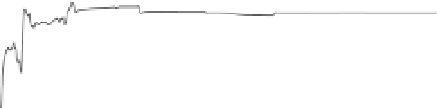
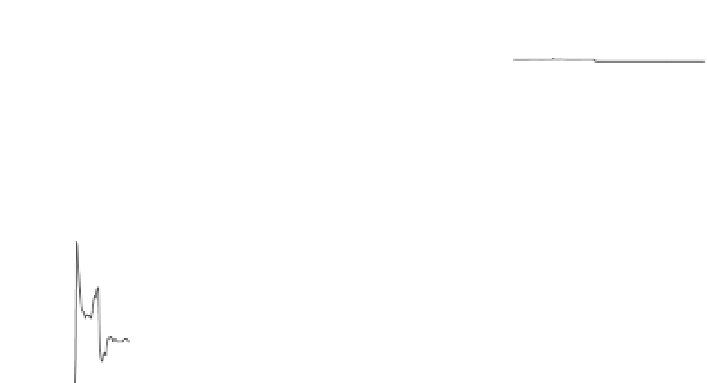
Typical adaptive forecasting results
Typical adaptive forecasting results are presented
in Figures 9.12 to 9.15. These are obtained with
recursive parameter updating applied only to the
Measured Flow
Forecast Flow
400
200
0
1953
1953.5
1954
1954.5
1955
1955.5
Date
0.2
0
−0.2
1953
1953.5
1954
1954.5
1955
1955.5
Date
100
Quick flow
Slow flow
50
0
1953
1953.5
1954
1954.5
1955
1955.5
Date
3
2
1
0
1953
1953.5
1954
1954.5
1955
1955.5
Date
Fig. 9.12
Leaf River example: three years of real-time updating following initiation after 50 days:measured and forecast
flow (upper panel); recursive estimates of model parameters (upper middle panel) and partition percentages (lower
middle panel); and overall steady state gain (lower panel). (See the colour version of this Figure in Colour Plate section.)